maxon Story
ALLEX, un nouveau paradigme dans la robotique humanoïde


De la détection d'une force de 100 grammes du bout des doigts au levage de plus de 30 kilogrammes à l'aide d'un crochet, ALLEX combine une dextérité, une force et une sécurité d'interaction comparables à celles des humains pour redéfinir la robotique humanoïde.
WIRobotics, guidée par la vision "Technology for People, Enhancing Quality of Life", est une entreprise de premier plan spécialisée dans les robots humanoïdes et portables qui privilégient la sécurité et la précision centrées sur l'homme.
Située au sein de l'Université coréenne de technologie et d'éducation, l'entreprise gère le Robotics Innovation Hub, un laboratoire de recherche avancée où des partenaires universitaires et industriels collaborent pour valider et partager les technologies robotiques émergentes.
maxon et WIRobotics ont établi un partenariat stratégique pour développer et vérifier conjointement des technologies d'actionnement de base. En outre, l'entreprise continue de faire progresser sa technologie en collaborant avec d'éminents instituts de recherche nationaux et internationaux.
S'appuyant sur cette philosophie, WIRobotics a développé le robot humanoïde ALLEX, conçu pour atteindre des capacités de manipulation et d'interaction de niveau humain.
ALLEX introduit un nouveau paradigme de recherche - "Beyond Motion, Toward Interaction " - et sert de plate-forme de base pour la recherche sur l'IA physique.
Pour atteindre les objectifs fondamentaux d'ALLEX, à savoir une agilité, une précision et une sécurité d'interaction semblables à celles de l'homme, les moteurs de haute précision de maxon ont été intégrés aux réducteurs exclusifs de WIRobotics, créant ainsi un système d'entraînement de haute performance qui va au-delà des solutions de motorisation conventionnelles.
Repenser le contact
Pendant des décennies, les robots ont été conçus pour éviter le contact. Dans la robotique traditionnelle, le contact physique était considéré comme une collision - quelque chose de dangereux, quelque chose à éviter. Mais les êtres humains vivent et travaillent au contact : nous nous serrons la main, nous transportons des objets ensemble, nous nous adaptons lorsqu'on nous heurte.
ALLEX, développé par WIRobotics, suit une voie différente. Au lieu d'éviter le contact, il l'embrasse - et va plus loin en détectant avec précision les forces d'interaction qui se produisent pendant le contact et en y répondant. Ainsi, le contact n'est plus un facteur d'échec, mais une source de capacité.
Les robots conventionnels traitent le contact physique comme une collision - quelque chose à éviter. ALLEX, en revanche, améliore ses performances en exploitant activement le contact physique.
Ce changement fondamental - passer de l'évitement du contact à son exploitation - est ce qui fait d'ALLEX non seulement un humanoïde de plus, mais aussi le fondement d'une nouvelle génération de robotique centrée sur l'interaction.
Les bras - légers, souples, et pilotables par l'arrière
Le niveau de motricité arrière visé par WIRobotics ne pouvait pas être atteint en combinant des unités d'entraînement commerciales. Cette constatation a conduit l'équipe à développer ses propres unités, en réduisant d'un dixième la friction et d'un vingt-quatrième l'inertie des réducteurs comparables.
Les bras d'ALLEX ont été conçus avec une structure antidérapante optimale qui leur permet de se déplacer avec l'agilité d'un bras humain tout en restant sûrs et conformes lors de l'interaction.
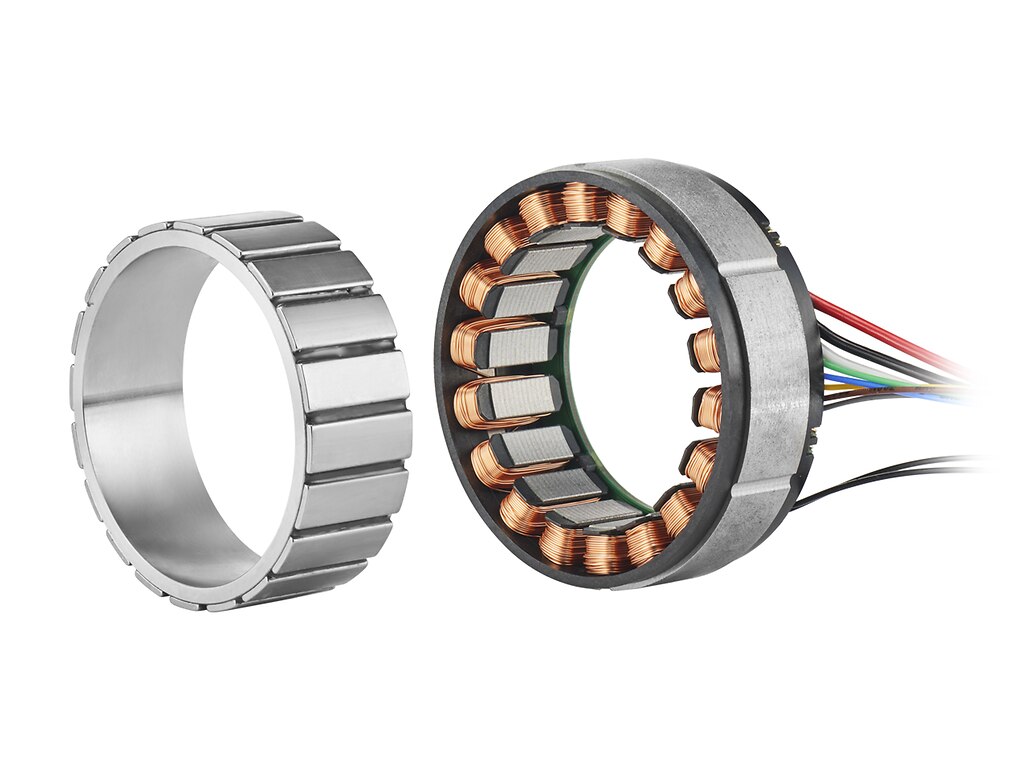
Au cœur de cette réussite se trouve le moteur sans cadre ultra-fin de maxon, développé et produit en Corée. Le moteur fournit un couple élevé tout en conservant une structure fine et compacte, ce qui le rend idéal pour des systèmes d'entraînement efficaces, même dans un espace limité. Associé au réducteur exclusif de WIRobotics, il permet une friction extrêmement faible et une inertie rotative minimale, ce qui améliore considérablement l'agilité et la maniabilité du bras.

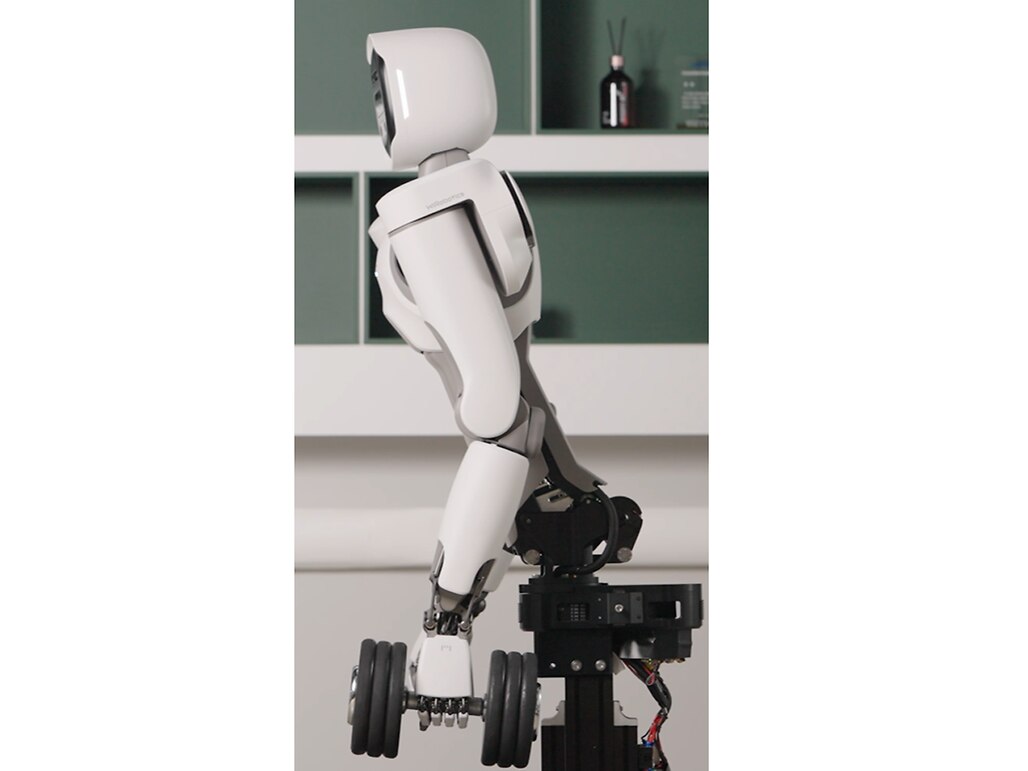
Cinq des sept actionneurs sont placés près de l'épaule pour réduire l'inertie distale et augmenter la réactivité de l'extrémité du bras. En conséquence, la masse totale sous l'épaule n'est que d'environ 5 kg, ce qui permet d'obtenir un équilibre parfait entre vitesse, sécurité et force.
Mains - Une dextérité comparable à celle d'un être humain dans une taille compacte
Chacune des mains d'ALLEX comprend 20 articulations, dont 15 sont des degrés de liberté actifs, ce qui correspond à la taille d'une main humaine.
Six actionneurs à haut rendement sont situés dans l'avant-bras, tandis que des actionneurs plus petits pour les mouvements fins sont intégrés dans la paume, ce qui permet une répartition efficace de la force et de la précision.


Les moteurs maxon compacts intégrés dans cette conception offrent des performances à haute vitesse avec de faibles vibrations et une génération de chaleur minimale, garantissant d'excellentes caractéristiques de transmission de couple.
En outre, les mains d'ALLEX adoptent une structure hautement rétrocontrôlable qui permet une réponse flexible aux forces externes, fournissant un contrôle de mouvement précis et naturel.
Cette configuration avancée permet aux mains d'ALLEX d'atteindre à la fois précision et puissance :
- Détecter 100 g de force externe sans capteurs tactiles
- Générer jusqu'à 40 N de force du bout des doigts
- Manipuler des charges utiles de 3 kg de manière stable
- Soulever plus de 30 kg à l'aide d'une poignée à crochet
Malgré sa force, la main reste légère et compacte, conservant des proportions humaines tout en atteignant des performances de nouvelle génération.
Nous considérons la main d'ALLEX comme la norme de la prochaine génération pour les mains humanoïdes - flexible mais forte, précise mais de taille humaine.
Taille et cou - Compensation passive de la gravité
La taille et le cou d'ALLEX offrent chacun deux degrés de liberté, soutenus par des mécanismes de compensation passive de la gravité. Au niveau de la taille, ce système équilibre le poids de toute la partie supérieure du corps, quelle que soit la posture ou la charge des bras.
En neutralisant mécaniquement la gravité, les articulations n'exigent qu'un couple minimal, ce qui permet un mouvement sûr, conforme et économe en énergie. Cette conception passive rend également ALLEX naturellement réactif au contact, tout en réduisant la tension sur les moteurs lors d'une utilisation prolongée.
La taille compense pour l'ensemble du haut du corps, quelle que soit la posture des deux bras.
Intégration du système - Coordination en temps réel
Avec 48 degrés de liberté au total, ALLEX fonctionne sur une communication à grande vitesse EtherCAT gérée par le contrôleur personnalisé de WIRobotics. Cette architecture permet une coordination synchronisée et en temps réel de l'ensemble du corps, du bout des doigts jusqu'au torse.
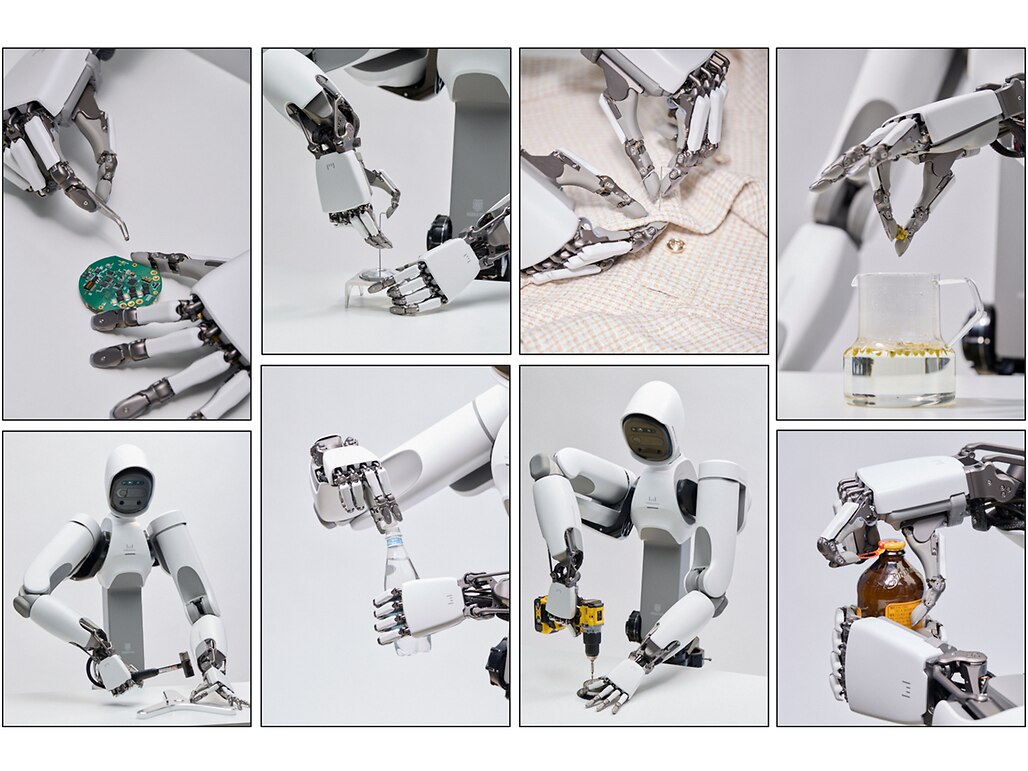
Les mains d'ALLEX démontrent tout le spectre de la manipulation humaine, du micro-assemblage à la couture délicate, en passant par le perçage à haute force, l'ouverture de bouteilles et les tâches quotidiennes. Alimenté par vingt articulations avec quinze degrés de liberté actifs et des actionneurs exceptionnellement rétrocontrôlables, le système se déplace de manière transparente entre précision, vitesse et force, capturant l'essence de la dextérité humaine dans une seule plateforme robotique.
ALLEX - Une plateforme vivante pour la recherche sur l'IA physique
ALLEX est plus qu'une simple démonstration de la dextérité humaine. Il est conçu pour servir de plateforme standard pour l'IA physique de nouvelle génération, permettant aux universités et aux équipes de R&D avancées d'étudier comment les robots apprennent non seulement le mouvement, mais aussi la physique de l'interaction. Les chercheurs peuvent explorer des tâches riches en contacts - combinant l'apprentissage par renforcement et imitation avec les modèles émergents de fondation des robots - sur un système unique et unifié.
Brochure
Robotique

Des solutions d'entraînement de 0.0002 à 120 Nm. L'environnement industriel devient plus rapide, plus précis et plus sûr. Cela impose des exigences élevées aux machines.
De la préhension douce à la force dynamique
Les mains dextres à haut DoF d'ALLEX passent sans effort du micro-assemblage délicat aux tâches dynamiques à fort impact : coudre un bouton, soulever une languette de bouteille, serrer des boulons à l'aide d'une clé en L ou frapper un coup de marteau. Cette rare combinaison de sensibilité et de force comble une lacune de longue date dans le domaine de la robotique, où les bras industriels excellent pour les charges lourdes mais manquent de finesse, et où les mains des chercheurs sont précises mais fragiles. Construit avec des actionneurs mécaniquement transparents et hautement rétrocontrôlables, ALLEX maintient une réactivité en temps réel sur toute la chaîne du bras, du poignet et des doigts, capturant ainsi tout le spectre de la manipulation humaine dans une seule plateforme. Il démontre non pas des astuces isolées mais un continuum de contrôle, permettant aux ingénieurs de tout tester, de la précision sub-millimétrique à l'impact soudain, sans changer de matériel.
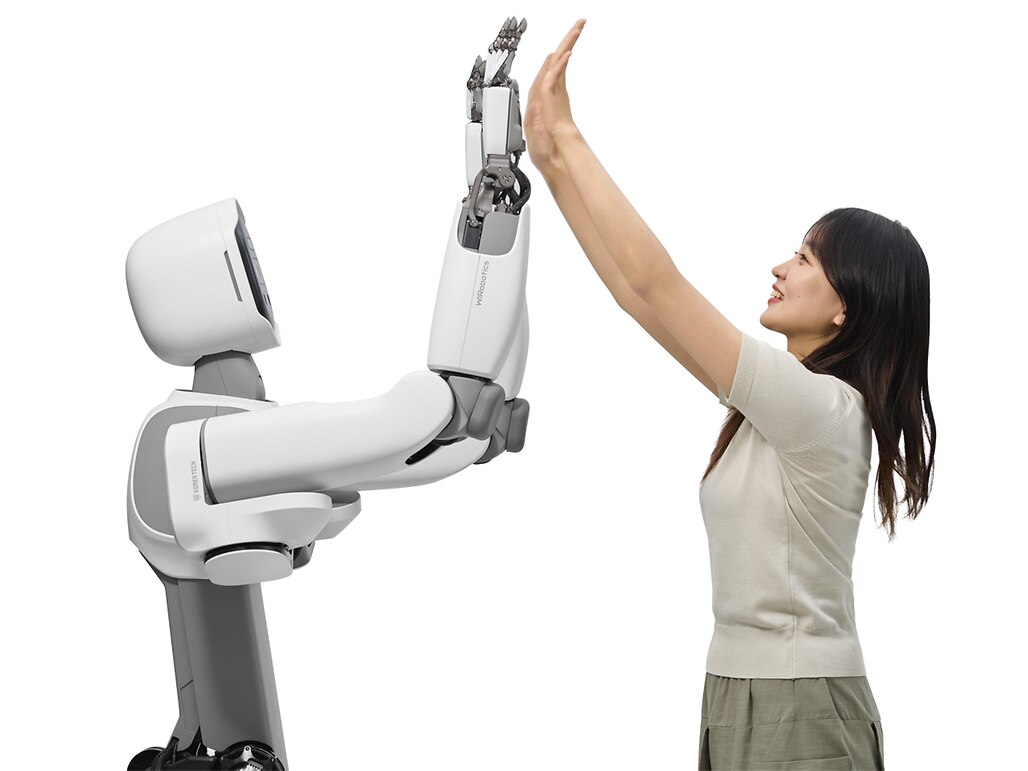
ALLEX établit une nouvelle référence pour les robots qui apprennent non seulement à se déplacer, mais aussi à interagir avec le monde et avec nous.
Au-delà du mouvement - vers une robotique centrée sur l'interaction
Dans le domaine de la robotique, diverses approches - telles que l'apprentissage par renforcement, l'apprentissage par imitation et le développement de modèles de fondation de robots par le biais de VLM et de VLA - sont activement explorées. Cependant, aucune de ces méthodes n'a encore produit une percée comparable à l'impact qu'ont eu les grands modèles de langage sur l'intelligence artificielle.
La raison en est la focalisation. La plupart de ces approches ont été tentées principalement du point de vue du mouvement, plutôt que de l'interaction. Ce n'est pas que les chercheurs aient négligé l'interaction, mais il y a eu un manque de robots capables d'interagir naturellement comme des humains tout en capturant précisément les forces en jeu.
Sans robots capables d'une véritable interaction, les progrès de la robotique resteront limités au mouvement.
Redéfinir l'avenir des humanoïdes
ALLEX est plus qu'un robot : il représente l'avenir de la collaboration homme-robot. Il redéfinit la manière dont les robots apprennent, s'adaptent et interagissent, s'imposant ainsi comme une plateforme vivante pour la recherche sur l'IA physique.
Au cœur de cette vision se trouvent la conception innovante et la technologie de contrôle de WIRobotics, renforcées par les solutions d'entraînement de précision de maxon, qui augmentent l'exhaustivité et la fiabilité d'ALLEX.
Du mouvement délicat du bout des doigts aux mouvements équilibrés de la taille et flexibles du cou, chaque élément de précision d'ALLEX incarne la synergie entre l'excellence de l'ingénierie de WIRobotics et ses partenaires de collaboration - en atteignant la précision, la fiabilité et la sensibilité réactive.
S'appuyant sur cette base technologique, Maxon et WIRobotics poursuivent leur étroite collaboration technologique pour ouvrir la voie à une nouvelle ère de la robotique. Ce partenariat va au-delà de la simple fourniture de composants, car les deux entreprises travaillent ensemble pour créer un avenir où les humains et les robots coexistent et interagissent en harmonie.
ALLEX évolue désormais au-delà d'un robot qui se contente de se déplacer, pour devenir un robot qui apprend, détecte et interagit véritablement avec les humains
