Expert Blog
Pushing Robotic Possibilities with Next-Generation Drive Systems


A key market for maxon’s actuators is robotics, a field currently undergoing rapid transformation and growth. In this article, Mario Mauerer, Business Development Manager Robotics, shares his vision of what a next-generation robotic actuation system could look like.
We can by no means predict the future, but we can extrapolate a few trends to form a vision. First, imagine that, very soon, autonomous robots will have permeated virtually all aspects of society. Autonomous cars and sidewalk delivery robots are just the beginning. Your letters and parcels will be deposited and collected by swarms of robots. Exoskeleton-equipped workers will, together with quadruped companions, build infrastructure. A robot will happily clean your hotel room (including the toilet!). There will be daycare robots entertaining kids in the sandbox (and take their diapers out). Apples are picked autonomously. You get the idea. I think that this world will become a reality sooner than we currently anticipate.
The heart of robotics: actuation systems
A core element of any robot is their actuation systems, which apply torque in a well-controlled manner to create motion. Robotic drives must be highly torque-dense, deeply integrated, reliable, and scale well in production. Let’s highlight some aspects of next-generation drive systems that will facilitate the ongoing robotic transformation.
First, safety will be essential. Millions of autonomous robots will operate in shared spaces with (soft and vulnerable) humans. This means that their drives must inherently provide some safety-relevant features. Safe-torque-off, where actuators are safely disabled, is only the very beginning and a first, basic approach. At some point, a safe provision of torque and motion will be required, which constitutes a whole new dimension of complexity. Currently, the technologies behind such capabilities are in early development stages still.
Integration: from “industrial Lego” to seamless systems
Drives will require an ever-deeper integration of subsystems in order to provide all necessary functions in a limited space. “Industrial Lego” will not be possible anymore. System boundaries become more fuzzy and interdependent. Actuators will become structural elements, and no one will want to (or even, can) deal with cables anymore; communication and power transfer needs to be combined. This integration trend will be enabled by new materials and production methods (as it always does).
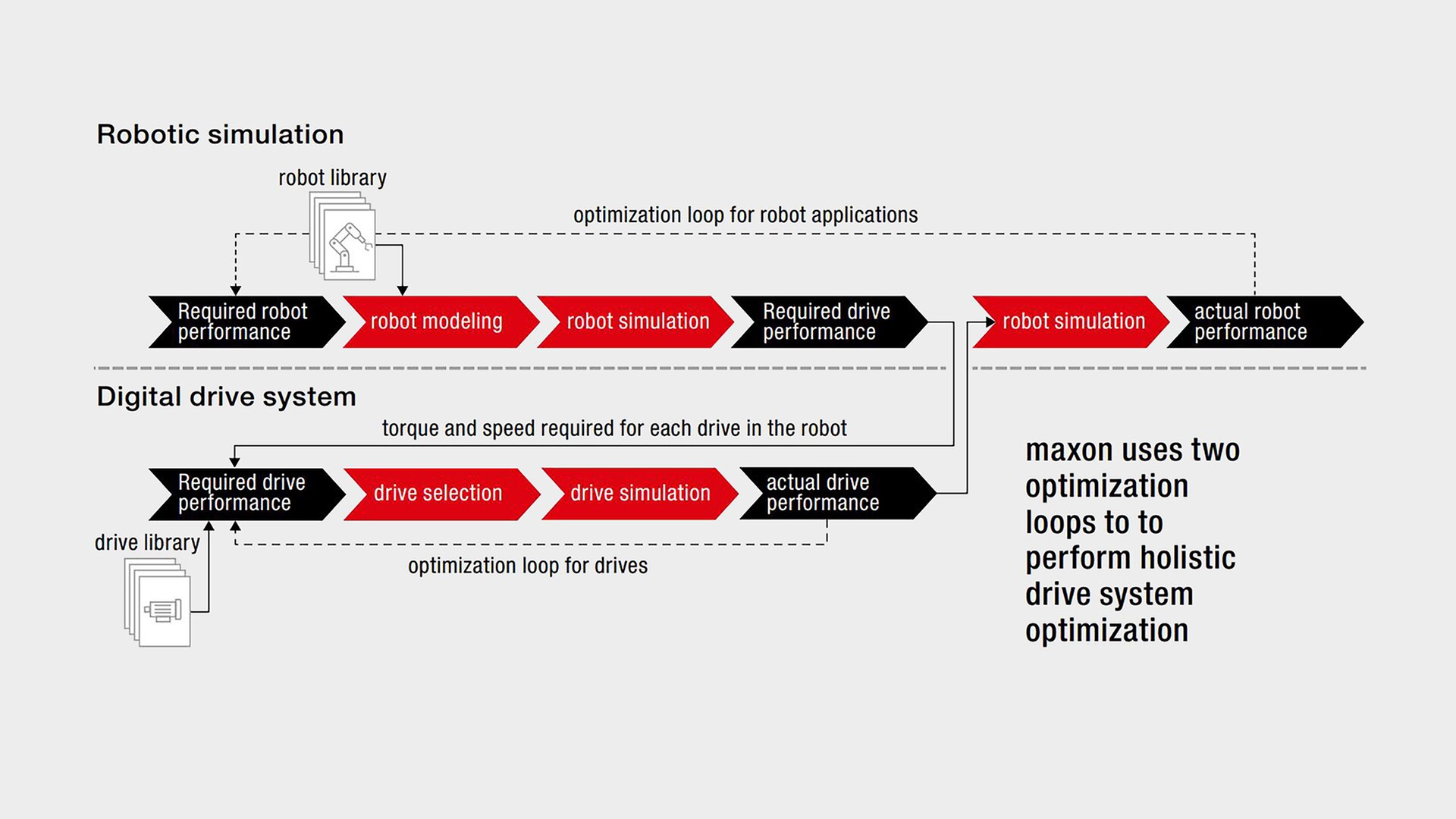
One aspect that starts to accelerate a deep integration already today is advanced system simulations. Such tools allow a deep system optimization and validation. We want to make sure that a roboticist can build a robot and it will simply just work, because they sufficiently simulated all sensors, actuators and control systems beforehand. Creating new robots is becoming really easy.
Compute and intelligence at the joint level
The next paradigm change relates to compute. First, one obvious enabler is machine learning. Advanced models or algorithms will be executed directly on the actuators, and will be sunsetting traditional, loop-based and cascaded control topologies due to their ability to deal with more complex and diverse data.
This might also imply that actuators will integrate many more sensors like IMUs or microphones to enable predictive maintenance or fail-save behavior at the joint level. Such sensors will also facilitate adaptive learning, where systems inherently autonomously react to changing conditions, like wear or defects, not via pre-programmed behaviors, but through an intrinsic knowledge of their architecture, interface and purpose.
A second aspect to compute is its spatial distribution. I think that the compute system of a robot will become more centralized, dealing with all sensor data at a single location. A contrasting view suggests that compute capacity could be more distributed across a robot – including the actuators. Time will tell which approach will be dominant (if any).
Nonetheless, all data created by actuation systems will be collected and either used locally and directly for control, or for preventive maintenance of individual robots or entire fleets. Future (wireless) connectivity advances will enable the transfer of massive amounts of data – and potentially even the real-time control of robots from the “cloud”.
Sustainability and life cycle thinking
Finally, one more emerging aspect of more complex drive systems are life cycle considerations. Actuators must not only be produced sustainably, but operate with minimal or no maintenance at a high efficiency. Fleets of millions of robots, many of them battery powered, must show a high degree of reliability and require only minimal maintenance, to further boost their adoption and reduce total cost of ownership.
This has some interesting implications for the business model of drive system providers, which, for the sake of brevity, I encourage you to have a discussion with your preferred large language model about.
Humanoids and beyond: complex systems, simple actuators
Humanoid robots are an especially hot trend these days. The field has exploded with new systems from various manufacturers and research institutes in the last 2-3 years alone. For me, a humanoid is simply a certain expression of an autonomous mobile robot that can perform manipulation or interaction. The complexity lies not in the robot’s form factor, but in the holistic mastering of the complexity of such a system.
Such robots, whether shaped like a humanoid or a quadruped (or any other form, e.g., balancing on a sphere etc.), employ state-of-the-art sensors, advanced control methods, and complex hardware, including the seemingly “simple” actuators that perform the mundane task of “rotating” (in reality, these systems are complex enablers and tightly integrate with the robot’s software and control system).
Reliability and functionality of such autonomous robots are still highly unproven, and topics like mobile manipulation are still unsolved research challenges. First commercial deployments are slowly emerging, e.g., in logistics applications and highly controlled environments. It will take some time until such systems—if they come humanoid- centaur- or quadruped-shaped will not really matter—will be broadly deployed in truly unstructured environments (e.g., distributing our mail).
What is certain is that the actuators and hardware must start to be reduced to a minimal complexity, i.e., reaching low costs and a high reliability, today. Otherwise, the massive growth and economic sensible deployment will not work out.
A robotic revolution in the making
I truly think that we are in the early phases of a wider robotic revolution. Next-generation drive systems will render this deep societal transformation ever more possible, and I truly hope that we at maxon can actively participate in this exciting journey for humanity.