maxon Story
Pocket-sized Delta robots.

Today, various microassembly tasks present ever greater challenges to drive technology. Whereas the microcomponents and systems are continuously getting smaller, the development of production systems in macroscopic dimensions is frequently left behind. A Swiss company has revolutionized the market with an entire product family of Delta robots. Strong maxon motors ensure high-precision dynamic movements.

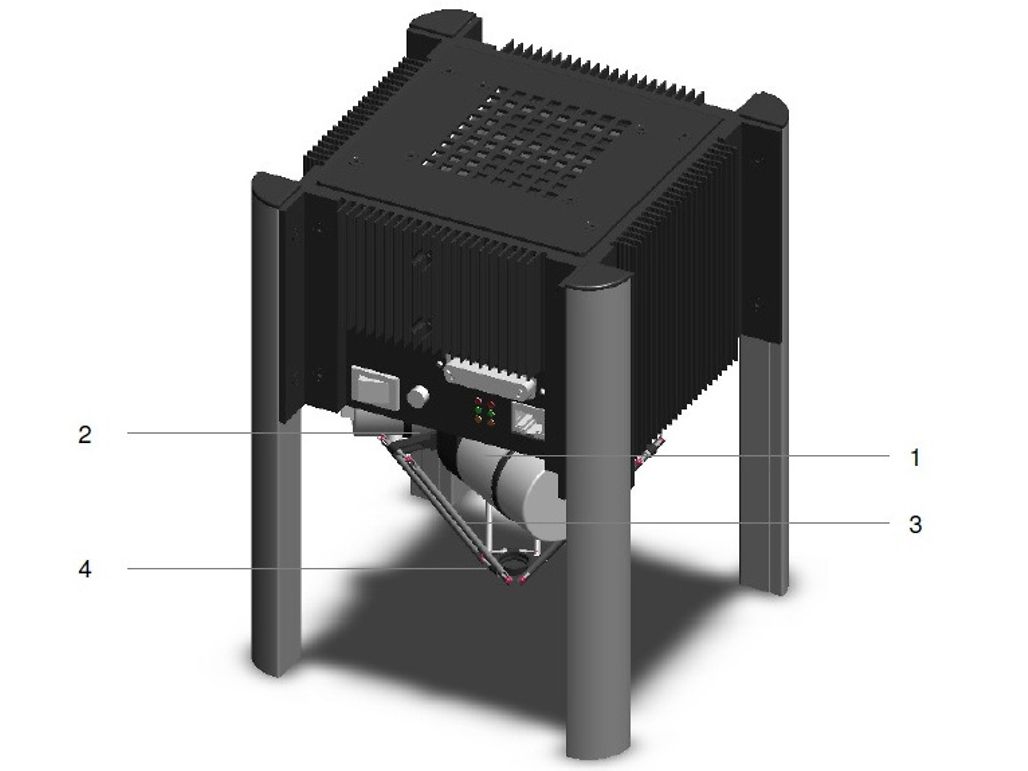
The three maxon EC-i 40 motors are clearly visible on the Pocket Delta Robot of Asyril. © 2012 Asyril
Asyril, a company from western Switzerland, specializes in the development and integration of mechatronic systems for fast and flexible automatic handling of small components, for example microscale components for micro, nano and bio technology. The company was founded by microrobotics specialist Dr. Alain Codourey in 2007 and builds on the technological know-how of CSEM and the CPA group. The founding of the company was preceded by the core question of whether it is possible to build a microrobot with a size of 100 x 100 x 100 mm3 and what the ideal kinematics would be for such a robot. As early as 10 years ago, researchers at CSEM (Swiss Center for Electronics and Microtechnology) noticed the increasing discrepancy between microcomponents getting ever smaller yet the size of the production systems staying constant. Whereas the mechanical structures of a robot is relatively easy to miniaturize, the same only holds true for drives to a limited degree: “In conventional systems, the motors remain very large in comparison to the mechanical components. As a result, the conventional kinematics of — for example — articulated arm robots are also unsuitable, because large motors are still required in the joints,” explains Dr. Alain Codourey.
To find a solution for this increasing discrepancy, microrobotics specialist Codourey and his research team at CSEM and at the Engineering and Information Technology department of the Bern University of Applied Sciences in Biel started looking for systems that are more suitable for handling microtechnical components. “In the end, we came to the conclusion that parallel kinematic structures are the most promising for our purpose,” explains Codourey.
With this objective in mind, the idea of a parallel kinematic axle system was perfected first. To keep the mass inertia as low as possible, all components are kept as delicate and light-weight as possible. A large advantage of the Delta configuration is the fact that, although the maxon motors are responsible for the movement of the kinematic elements, the motors themselves are not moved. Instead, the motors are attached to the support frame and transmit the movement directly to the structure. This engineering principle has been implemented in an entire range of Delta robots: The “Desktop Delta”, “Power Delta” and “Pocket Delta” have all been designed according to the same basic principle.
Slimline drive technology for microassembly
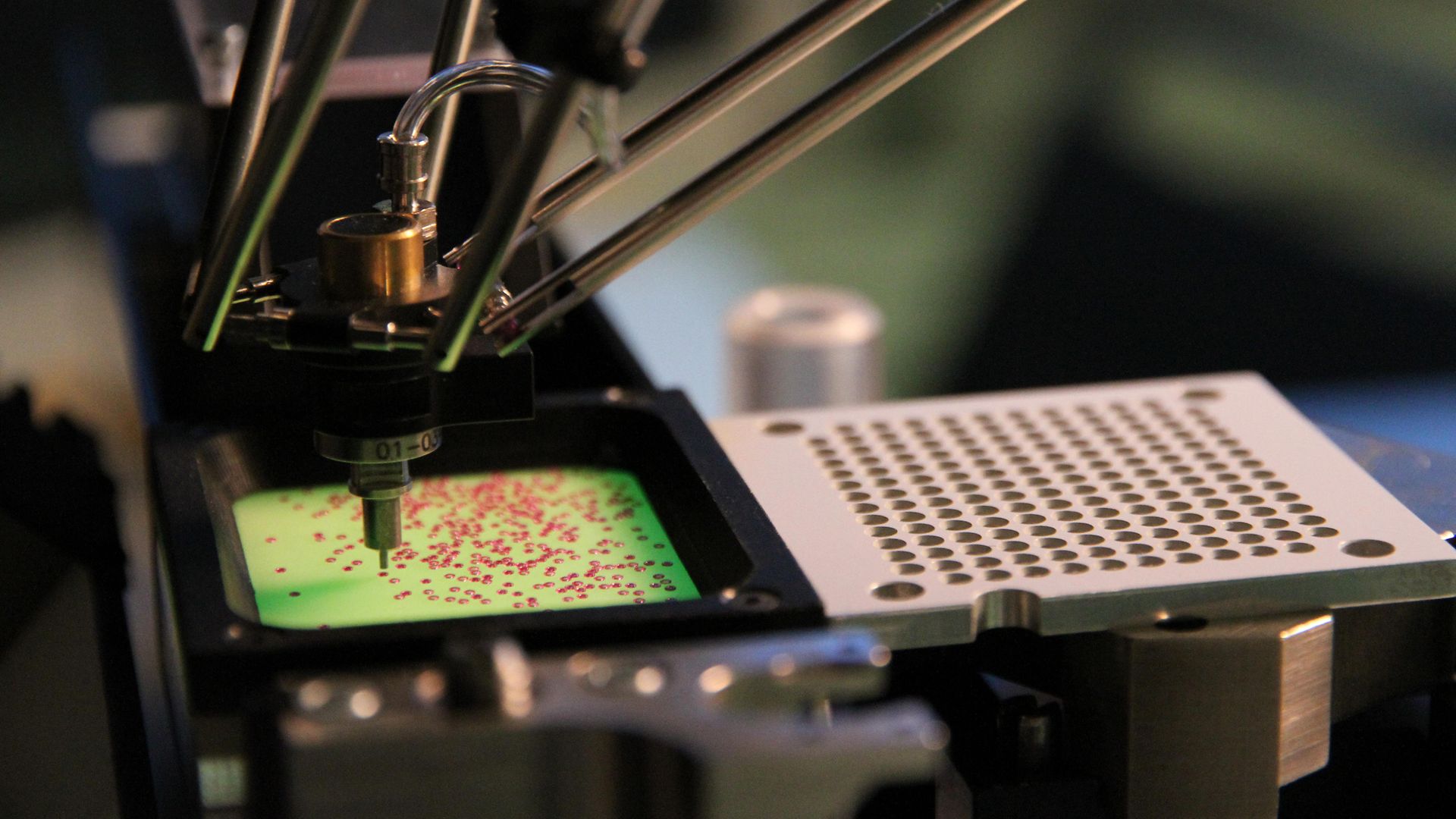
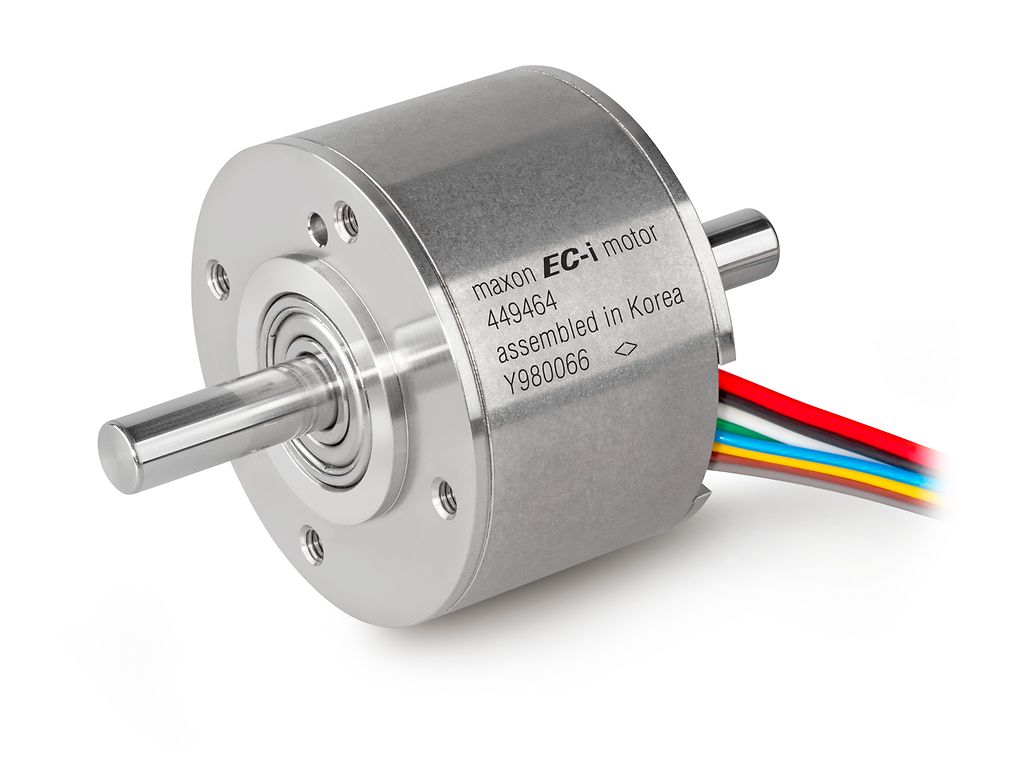
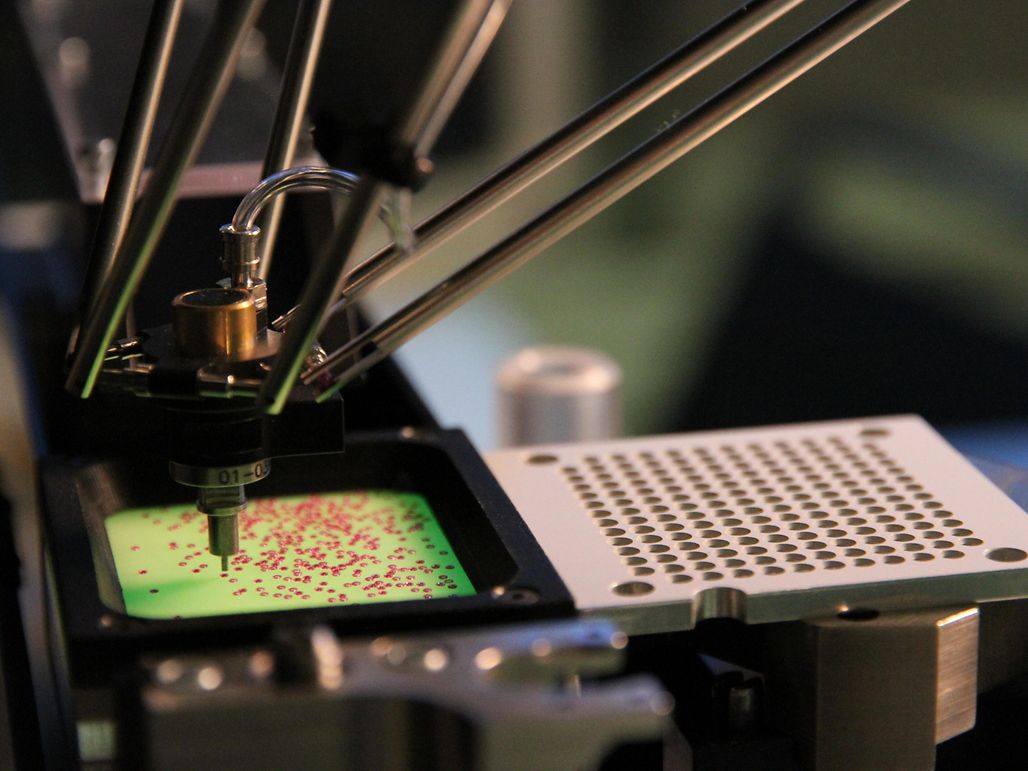
Not only the mechanical components had to slim down — the sizes of the drives themselves were also reduced. Instead of oversized motors with high power and correspondingly high heat emission, the Pocket Delta uses space-saving micromotors of maxon motor. The parallel mechanism of the robot is driven by three EC-i 40 motors that are all mounted to a plate above the robot. This means that the mass to be moved is very low; as a result, the robot is highly dynamic. The Pocket Delta needs 0.33 s for a single pick-and-place cycle and can thus complete three cycles per second. Thanks to the high rigidity of the kinematic structure, the robot has a repeat accuracy of less than 3 micrometers.
The brushless DC motors have a diameter of only 40 mm and a power of 50 W. To ensure that the Delta robot is not only fast, but also precise, the angle position of the motor has to be measured with high precision. The micromotors are therefore connected directly to high-resolution rotary encoders for position detection. Furthermore, each motor is equipped with a holding brake designed by Asyril. Small pins hold the motor shafts by means of a spring. During operation of the robot, these pins are pulled away by means of electromagnets to release the brake. The robot controller is fully integrated into the robot and the communication takes place via an Ethernet interface. With the features it provides, the miniature robot is especially suited to tasks that involve quickly moving or assembling tiny components. It is one of the fastest and most precise robots in its category. Another advantage of the chosen design is that no gearhead is required for the Pocket Delta.
The Pocket Delta Robots are used in various industries. However, its main talent is sorting, selecting and machining microcomponents in the watch industry. This solution is suitable for assembling nearly all components in mechanical clockwork, for example screws, rivets, pins or gears. But the Pocket Delta is also used in the field of medical technology and in the electronics and semiconductor industries. The components to be moved are typically between 0.5 and 15 millimeters in size.