Young Engineers Program
更上一層樓

對許多機器人來說,階梯仍是無法克服的障礙。不過,蘇黎世聯邦理工學院的一個年輕團隊正在製作一種可以輕鬆越過階梯的車輛——準確來說,是躍過。
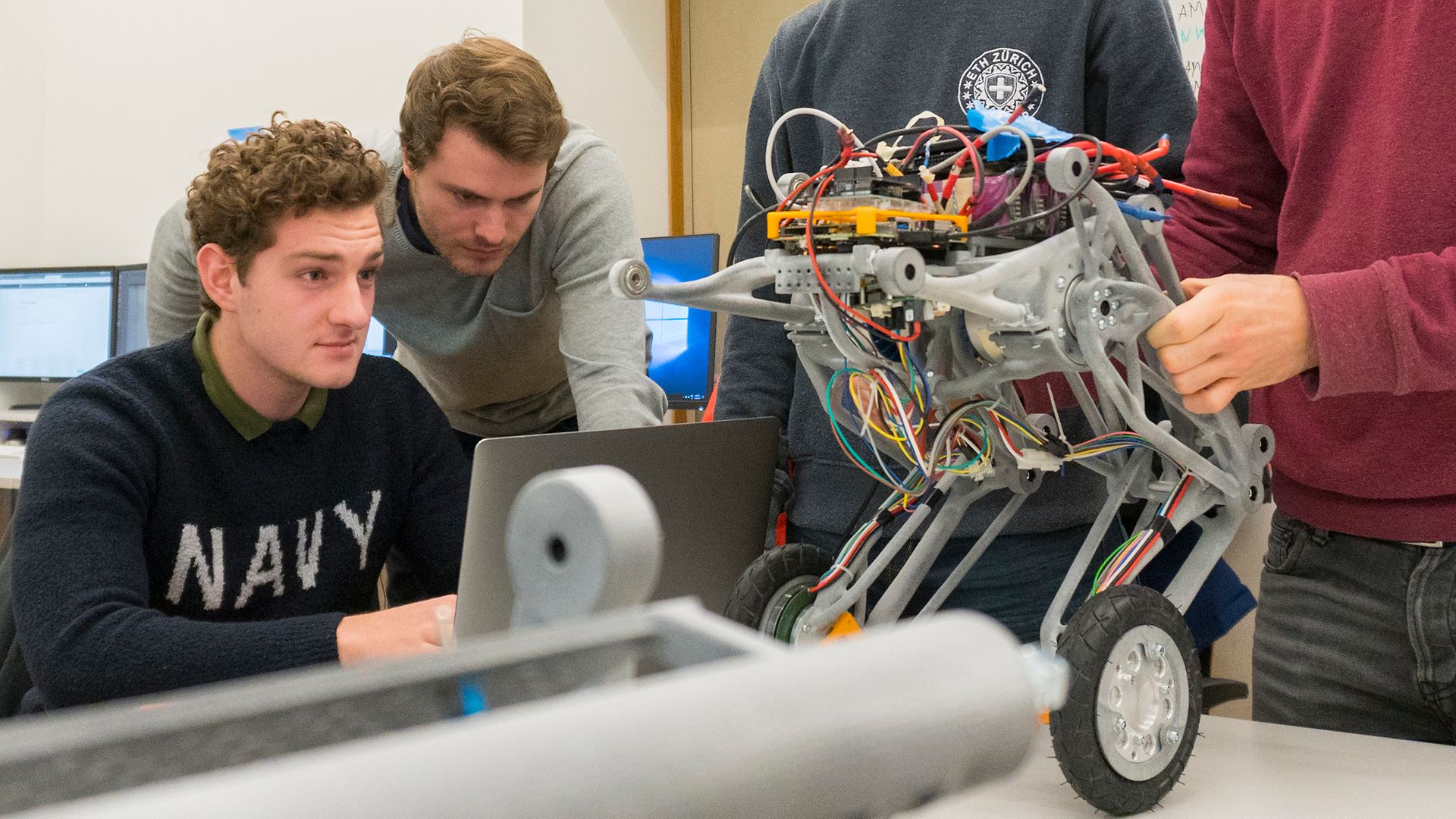
這個精密設備的創造者替它取名為「Ascento」。這個創新團隊由八名機械工程系和一名電氣工程系學生組成。這架機器人很特別:它依靠兩個輪子移動和平衡。從工程觀點來看,這比打造四輪設備困難多了。然而,雙足機器人機動性更高,且更能適應各種不同的地形。
不只如此:這九位前途無量的工程師的主要目標是讓機器人跳起來。他們希望機器人能像袋鼠那樣高高跳起,並且安全地兩輪落地。「這樣就可以使機器人克服階梯和其他障礙。」大學生 Florian Weber 如此解釋。Ascento 團隊源自於一個重點專案。在這類專案中,各科系的本科生都有機會將他們的知識應用到具體專案中——從初始想法到可運作的原型。
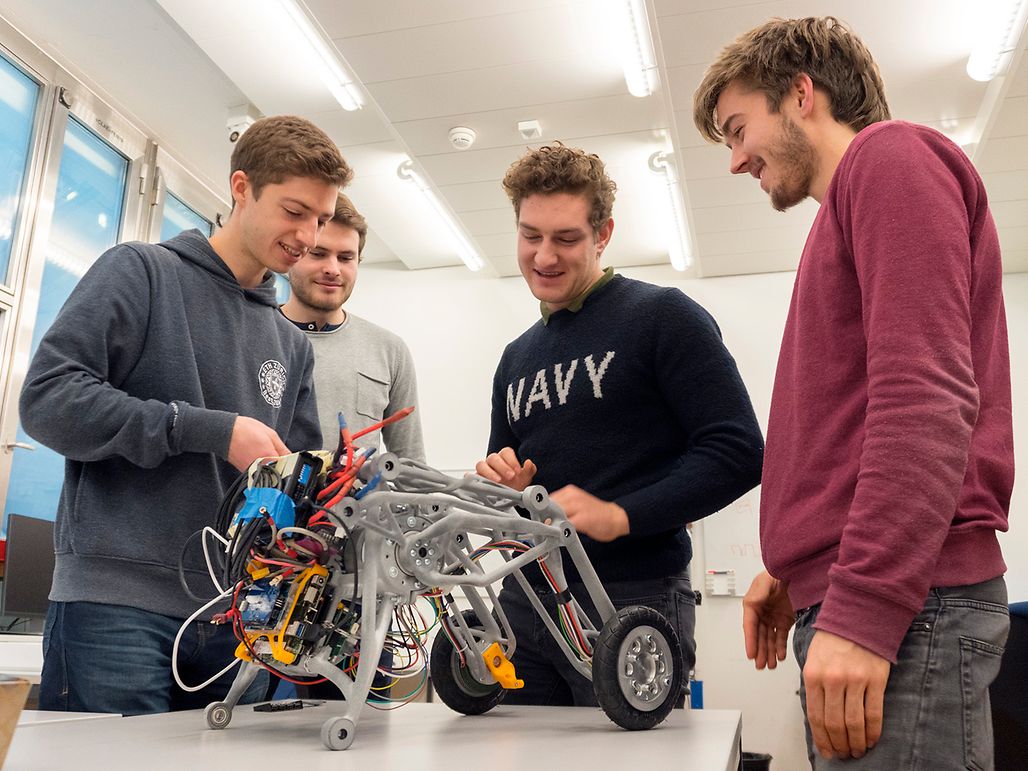
左起:Ciro Salzmann、Marcus Vierneisel、Lionel Gulich、Florian Weber
Ascento 的特性在於被設計為倒單擺:質量中心在軸之上。因此,Ascento 只能在受到驅動並主動在兩個輪子上保持平衡的情況下站立和移動——類似於站立的人,必須不斷消耗能量才能保持身體平衡。因此也可以將 Ascento 與同樣是兩輪驅動的賽格威作比較,兩者的輪子都在同一個軸上,需要控制驅動來保持平衡。
左起:Florian Weber、Dominik Mannhart
Ascento 的可能應用之一是例如建築物檢驗。比如,車輛可以進入失火或有倒塌危險的建築物中。內建的攝影機可以提供有助於將人員救出建築物的寶貴資訊。目前已經有多種機器人用於這些目的。然而:「特別是在爬樓梯時,許多機器人達到了能力極限。」九人專案小組成員之一 Marcus Vierneisel 如此表示。Ascento 的目標是能夠以人類行走速度爬上樓梯。由於採用輕盈的兩輪設計,Ascento 絕對比其他機器人更靈活。「另一方面,較大型的機器可以與周遭環境互動。這一點是 Ascento 辦不到的。」機械工程系學生 Lionel Gulich 補充道。Ascento 配備多個感應器,可以用來搜索建築物,並在短時間提供各個空間的 3D 掃描影像。當然,原型機還無法自行偵察整棟建築物。然而,可以利用遙控方式使它接近一段樓梯,然後利用它的感應器來測量和計算每爬上一階所需的跳躍高度和長度。「若每一次跳躍都要從遠端觸發,會很複雜且緩慢。」Florian Weber 說。也因此 Ascento 被歸類為半自主型機器人。
目前尚無法確定重點專案和 Ascento 原型機最終是否能夠成為可以商業化生產的檢測機器人。但是,這也不是主要目標。重點專案旨在讓蘇黎世聯邦理工學院的學生能夠在實際專案中親手嘗試,而不是僅僅死記硬背理論。
作為 maxon 的青年工程師計劃(YEP)的一部分,這些學生們將獲得驅動模組專業製造商 maxon 的技術和資金協助。Ascento 採用的驅動模組包括兩顆 maxon EC 90 flat 盤式馬達。在技術方面,當機器人僅沿著單一平面移動時,這些馬達可提供的 963 mNm 轉矩似乎有點過高。但是當 Ascento 在狹窄階梯上著陸後必須保持平衡時,驅動模組就發揮作用了,因為這需要高轉矩和精確的控制性能。蘇黎世聯邦理工學院的學生們決定採用無框版本的馬達。轉子和定子分開供應,且不含輸出軸。轉字和定子之間僅在整合至系統期間相連結。尤其是在機器人技術領域,maxon 的無框馬達經常是首選產品,因為它們能夠大幅節省空間並俐落地整合至關節結構中。每一顆馬達都由一個 EPOS4 模組驅動。
圖片版權
Adrian Venetz / maxon motor