maxon Story
翻山越嶺-探勘機器人大展身手。

在當今災難防護、搜救任務中,智慧型機器人系統的應用越來越受到重視-特別是在對人員具有高危險性的區域。爆炸、地震或其他天然災害發生之後,為了營救或搜尋陷入人員無法接近之處的災難生還者,機器人已成為不可缺少的救難幫手。maxon motor 性能強大的 EC 馬達為日本製造的救災機器人「Quince」 提供強勁的驅動力。


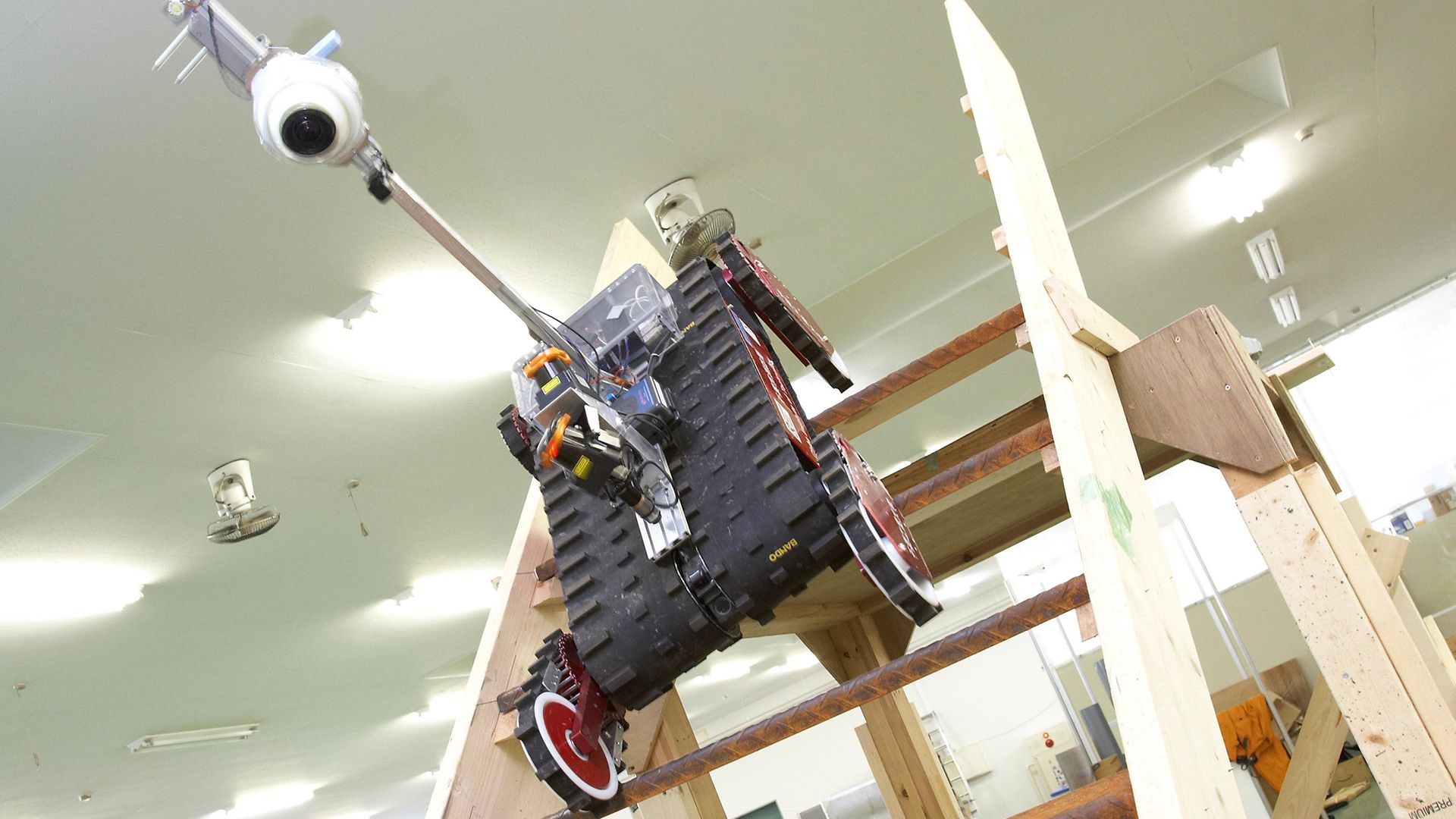
在橫跨不同表面時,如碎石 地面,機器人會自行為輔助爪輪找 出最佳位置。© 2012 fuRO
用於災難地區的機器人必須具有非常大的質量,並且擁有對環境的高適應力。它們的體型不能過大,也不能太重,而且行動必須靈敏,這樣它們才能鑽入隙縫或狹窄通道,直達建築物內部中心。除此之外,表層顛跛的地形也不能難倒它們。這些救災機器人可以在救難人員進行區域搜索之前深入建築物,先行探測是否有氣體、放射線或是其他會威脅生命的危險物質。Quince 機器人已證明它具備上述所有特性。在 2011 年日本的強烈地震以及由之引起的福島核能災難發生之後,Quince 在同年 6 月順利進入核能廠廢墟的上方樓層,同時展開核輻射外洩的測量,並且將高解析度影像傳輸至外界(見 QR code)。對於人類無法窺視的地帶,全靠機器人為我們取得寶貴的資訊。
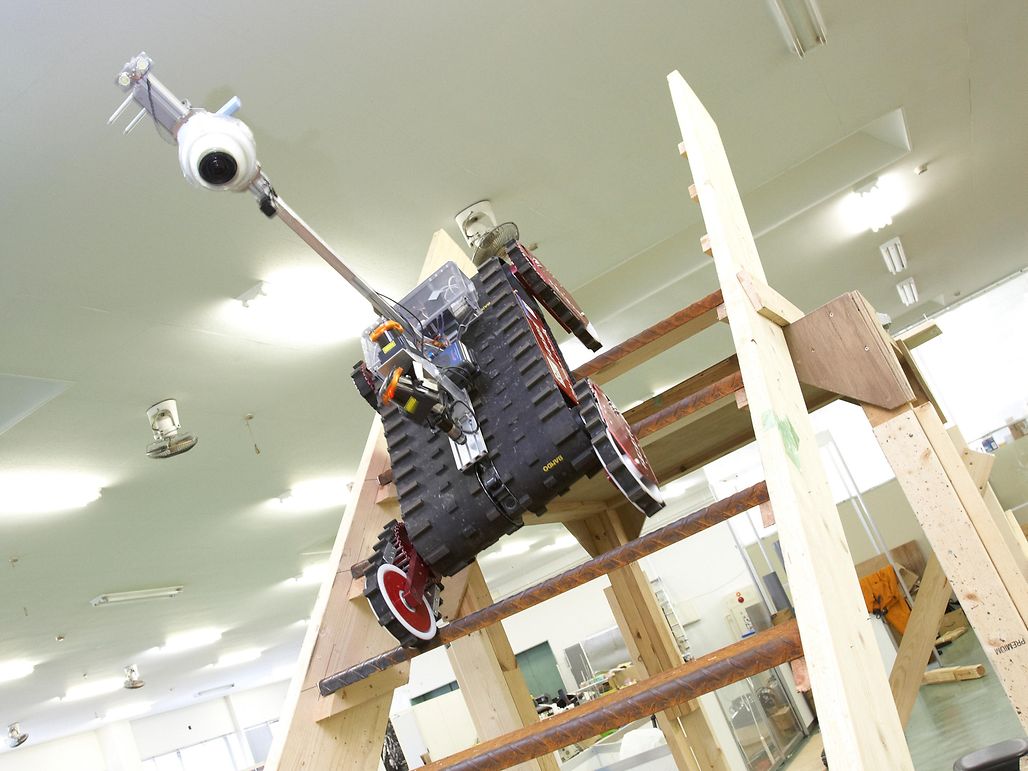
Quince 的重量為 27 公斤,配備四具靈活的履帶式驅動裝置(輔助輪爪)。這些輔助輪爪能夠自動調整配合地底角度位置-不論是陡峭的階梯或是難以通行的地面。最重要的先決條件是能確實地與地面接觸。而透過測量輪爪馬達的功率消耗,可以精確分析是否有正確的地面接觸。除此之外,分別安裝於前後輔助輪爪的位置感應器 (Position Sensitive Device,PSD) 亦測量與地面之間的距離。除了運用夾臂(圖 2)之外,也可將兩台雷射掃描器固定在機器人上,對建築物結構進行精確的偵測。
另外,Quince 行動迅速,速度高達每秒 1.6 公尺,並且擁有一架(鷹眼攝影機)「Birds Eye Camera」。雖然在運作時必須由操作員指定方向,但是在橫跨不同表面時,例如階梯,機器人會自行為輔助爪輪找出最佳位置。而新一代的 Quince 系列更另外加裝用來收集輻射塵或超細微顆粒的設備,而且還配備了 3D 掃描器。為了使機器人在任務中不會走失,亦可使用無線網路系統。如此一來,即使電纜斷裂,仍然能夠繼續對機器人進行導航。
這台救災機器人是由千葉工業大學未來機器人技術研究中心(fuRO) 的副所長小柳榮次所研發。小柳本業為教師-51 歲時獲得教授職位。因此,他具有與其他機器人研究人員完全不同的專業背景。Quince 是特別為極度惡劣環境條件所設計的機器人,專門用於對人類有高度危險的地區。因此,它最主要的應用範圍便是災區。「在研發一架機器人時,首先要考慮到的是機器人之後所必須執行的任務。而這一點正是最大的挑戰」,小柳如此解釋。截至目前為止已經完成了 8 架 Quince 機器人。但在一切就定位之前,必須確保所有元件 100% 功能正常。因此,研究人員在位於美國德州大學城的一個練習場(災難城)《Disaster City》對機器人進行了各式各樣的測試。在機器人比賽 RoboCup 中,Quince 是唯一個通過所有比賽障礙跑道的機器人。在準備進入福島核電場內部執行任務時,必須完成幾項特殊要求。「核子反應爐所在的建築物裡的環境條件極端惡劣,如果我們不事先為 Quince 作出適當的調整,就將它送入,那麼這很可能就是它最後一次的任務了」,小柳如此說到。在日本的探測任務中,機器人必須克服從 2 公尺高處墜落的情形,且還必須在長時間無保養的情況下運行。
強勁馬達克服所有障礙
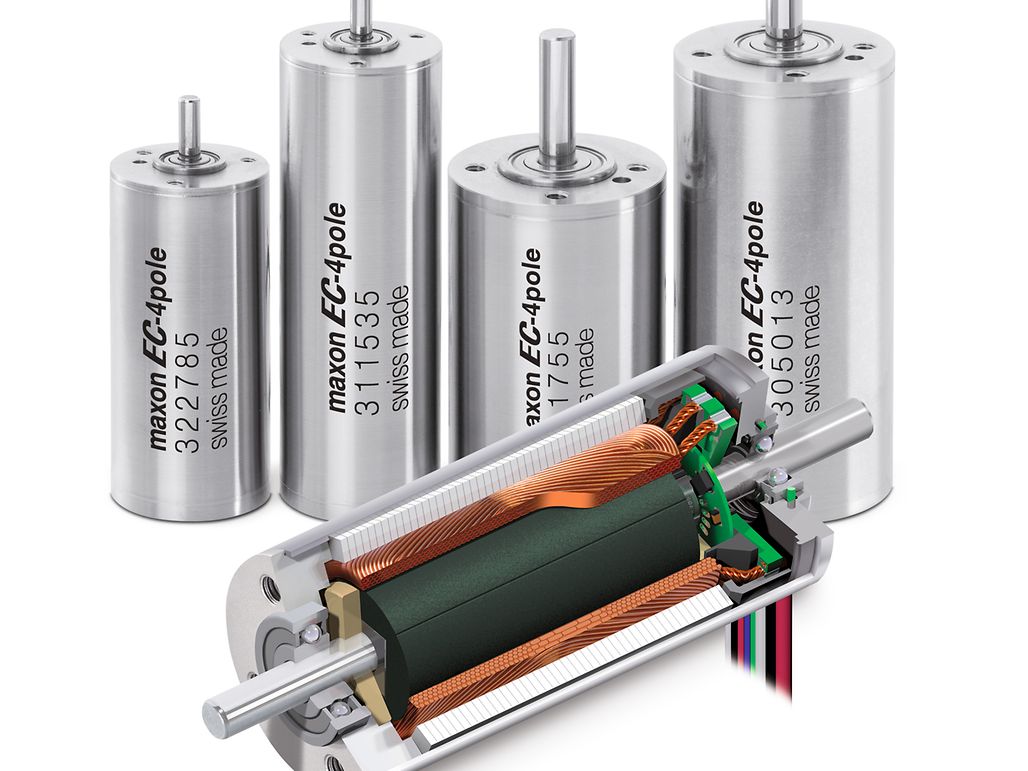
在選擇馬達時,fuRO 必須找出可靠的驅動裝置。馬達必須能同時提供高功率和優良耗能效果,且體積小及輕。maxon 馬達完全符合這些條件,小柳如此解釋。一共採用 6 組高性能的 maxon 馬達為機器人提供驅動力。每顆 EC-4pole 30直流無刷馬達可輸出高達 200 瓦特的功率,並分別以雙架方式安裝於兩條主履帶內。這款 4 極超強驅動裝置能完全供應 Quince 在行經凹凸不平的地形時所需要的動力。另外四顆馬達 (EC 22) 則用來驅動可依地底形勢自動調整角度位置的活動式履帶傳動裝置(輔助爪輪)。Quince 的 3D 掃描單元的動力來自 RE max 24,用以移動至正確的位置。仰賴特殊繞組技術和 4 極磁石的作用,讓 maxon EC 4 pole 驅動裝置擁有無人能及的單位體積和重量功率值。這些馬達不會產生頓轉轉矩,具備極高的功率和絕佳的動態調節性能。同時,金屬殼體能確保良好的排熱效果和機械穩定性。所有移動履帶的馬達皆採用 GP 32 HP (High Power) 行星式減速機,並搭載 MR 編碼器。減速機完全依照客戶需求進行調整,裝配一個大型滾珠軸承和加強型馬達軸。藉著這套性能強大的系統,Quince 幾乎可以毫無問題的克服所有障礙。