Expert Blog
如何選擇編碼器 - 第一部:特性

如何為您的應用選擇正確的編碼器?這個部落格為您解惑。
對於許多小型馬達應用來說,最好的反饋式感應器選擇是數位型增量編碼器。在仔細探討如何為定位和轉速調節應用選擇編碼器之前,這個部落格的專題系列將從重新思考編碼器最重要的特性開始談起。
典型需求為何?
每個應用都有所不同。主要任務可以是位置控制,或是轉速調節。轉速調節和位置控制的精確程度可能大不相同,因此必須在選擇編碼器之前先定義出來。在轉速調節方面,低轉速(低於 100 rpm)時比高轉速時(1000 rpm 及以上)更需要較好的反饋功能。
所承受的負載可能直接施加在馬達上,或是可能有機械轉換系統,例如減速機、螺桿或其他系統。編碼器通常安裝在馬達軸上,但也可能安裝在負載本身上。編碼器的選擇會受到轉換機構的機械特性所影響:齒輪減速和機械間隙都必須被納入考量。
此外,溫度、振動、電磁干擾等環境條件也可能影響到編碼器的選擇。例如光學編碼器就應該加以保護,避免受到粉塵汙染。磁性編碼器可能對於外部磁場特別敏感(包括馬達的磁場),因此需要屏蔽。
增量編碼器具有哪些重要特性?
增量編碼器的特殊參數是馬達每轉的矩形脈衝數。一般而言,會有兩個通道送出同樣的脈衝數。這兩個信號具有四分之一脈衝長度的相對相移。透過這樣的安排,可以感測到馬達的旋轉方向,且每次脈衝可給出 4 個不同的狀態。這些狀態有時候會被稱為 quadcount(直譯:四分之一計數)。它們代表的是實際解析度,比一個通道上的脈衝數還要高 4 倍。1000 cpt(每轉的計數或脈衝)的編碼器每轉可以給出 4000 個狀態或是 360°/4000 = 0.09° 的標稱解析度。
觀察:在討論編碼器的解析度時,必須確保每個人都在說同樣的東西:每個通道的脈衝數(cpt)還是狀態數(quadcount)。
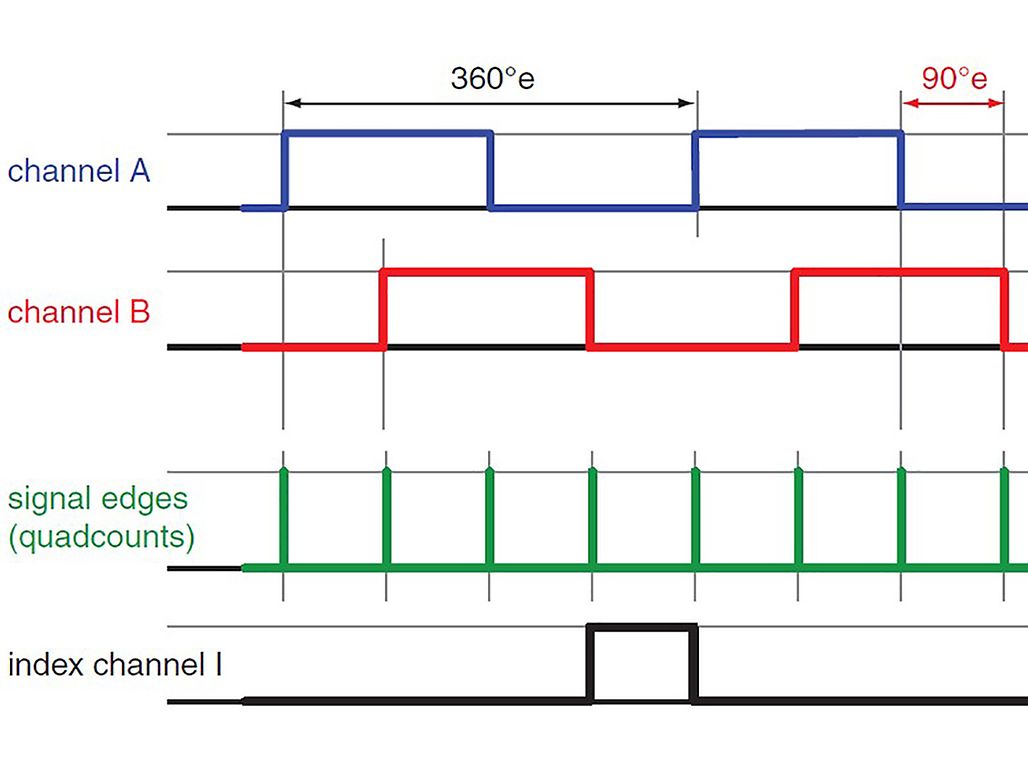
數位增量編碼器的信號。計算狀態變化次數(通道 A 和 B 的信號邊緣)可得出比一個編碼器通道上每轉次數高出 4 倍的解析率。
編碼器的解析度的變化可以非常大。可以是非常簡單、只用來感測運動的 1 cpt(或是 4 個狀態)編碼器,或是用於高度精確反饋位置或轉速、超過 10,000 cpt 編碼器。許多因素都會影響到編碼器的實際最佳解析度:基本的物理原理(光學、磁性、抗感等)、初級信號類型(類比或數位)、信號處理(例如內插),以及機械配置等。然而,本部落格並非專門探討編碼器的設計,而是要討論特定應用的控制需求應如何搭配合適的編碼器。
編碼器有多精確?
解析度,也就是狀態數,指的是標稱精確度,即在 1 個狀態的誤差內已知的位置。然而,編碼器的脈衝長度也會因為機械公差而有變化(例如軸偏轉量、磁極的長度和其他)。馬達旋轉上某一區域的脈衝可能比其它區域的脈衝短。因此,所測得的位置會偏離馬達每次週期性旋轉的實際位置。
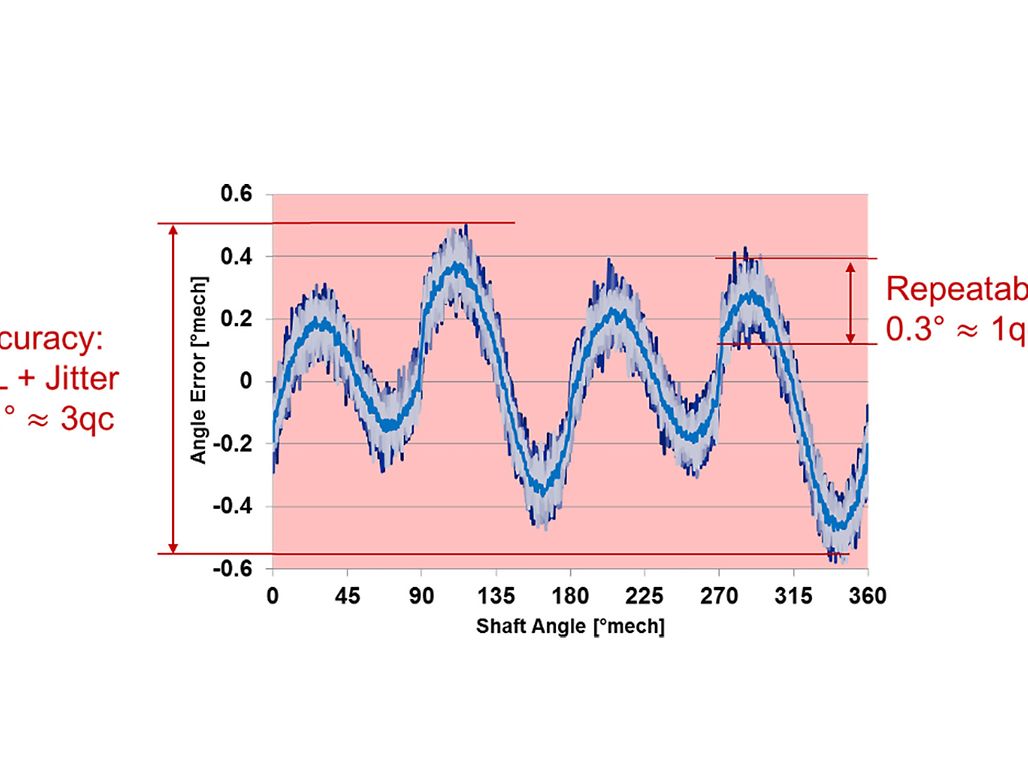
此例為在一個 256 cpt 磁內插編碼器上所測量到的非線性。與完美位置之間的偏差顯示為一個編碼器信號的功能(1024 quadcounts)。該圖顯示馬達 1 轉的 25 次測量。可以清楚看到每轉之後的偏離一再重複。與平均絕對位置的差異約為 +/- 0.45°,或是約 0.9° INL。在指定的編碼器位置中,信號雜訊(抖動)約為 0.3°,相當符合 1 個狀態的變化(360° / 1024 = 0.35°)。
最大偏差(峰值到峰值)被稱為積分分線性(INL)。對於許多講求絕對位置精確度的應用而言,INL 非常重要。可重複性,也就是在指定的設定值之下始終能夠達到同樣的位置,並不會受到 INL 的影響。可重複性主要牽涉到信號抖動,狀態變化次數通常小於 1。
增量編碼器還是絕對式編碼器?
增量編碼器只能給出位置變化。若要絕對定位,首先必須建立一個基準位置或原位。這可以透過將機構移動到一個外部基準點來達成;該點可以是一個機械終端止擋或是極限開關。
有些編碼器具備第三個通道,每轉可發出一個脈衝。此指標通道的邊緣會在一次旋轉中給出絕對位置基準。外部基準位置的精確度有限,但這現象可以透過額外移動到指標通道邊緣之一來改善。然而,請注意,指標通道並非定位的先決條件。事實上,機器建造者試著避免使用指標來定基準,因為在這種情況下,若更換了馬達-編碼器單元,就必須要重新校準。此外,有些控制器使用指標通道來交叉比對編碼器信號和監督編碼器每轉的計數。
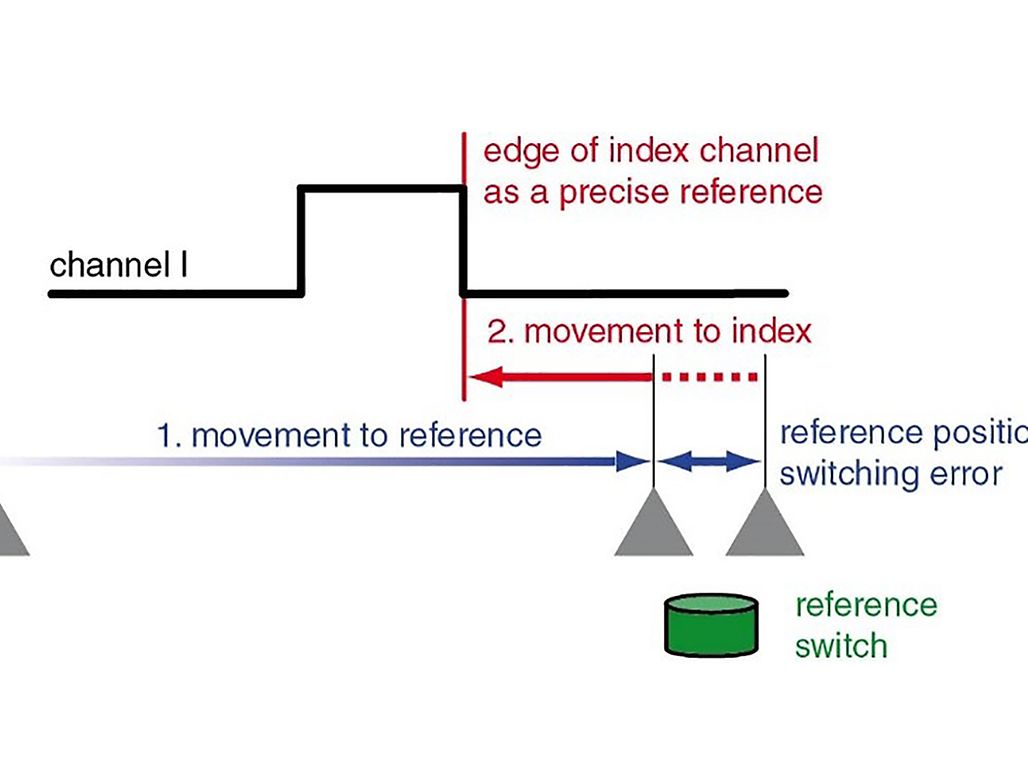
透過朝指標通道信號邊緣的額外移動的方法來改善基準位置的精確度。
傳輸信號時應注意哪些事項?
長直線距離的傳輸建議使用線路驅動器,可獲得較好的信號品質。對於定位應用,線路驅動器可說是不可或缺,因為可以避免遺漏編碼器脈衝。
線路驅動器可以為每一個通道(A、B、I)生成反信號(Ā、B̄、 Ī)。每一對信號都會被同時傳輸,並受到差值評估,因此在信號傳輸過程中會過濾掉任何電磁干擾。有利的副作用是,信號品質獲得改善,信號邊緣更明確,驅動器的功能可以讓信號傳輸更長的距離(最長達約 30 m)。
編碼器需要有最低電源供應。在長距離編碼器線上,線路電阻和相應的電壓降可能會產生問題。請檢查線路截面和電源電壓。
環境條件、耐用度
編碼器的標準工作溫度範圍在 -30°C 至 +100°C 之間。這涵蓋了大多數的應用和馬達所產生的熱度。
在會發生強烈振動和機械衝擊的應用中,堅固的機械外殼和良好的線纜應力消除措施是很重要的。
光學編碼器對於電磁干擾較不敏感,但磁性編碼器就必須使用良好的屏蔽來防止雜散磁場的干擾。光學編碼器的外殼如果未緊密閉合,就會受到粉塵的影響。
在下一篇文章裡,我想要更明確地說明如何針對位置控制和轉速調節選擇編碼器。