Young Engineers Program
靈活的協作式機器人

加拿大拉瓦爾大學的研究人員開發出一款靈活度可與人類媲美的新型協作式機器人。
協作式機器人,簡稱 cobot,是可以由人類直接操作的機械臂。透過這樣的方式,人員不需要使用複雜的程式設計介面,就可以教導機器人執行任務。一般的商用協作式機器人大多數基於串聯架構。它們採用大減速比執行器,因此無法以機械方式反向驅動。力/轉矩感應器會對人類使用者施加在機器人上的力量做出反應。因此,這類機器人的動作無法像人類一樣靈活,在人類引導的任務中使用起來相當不自然。
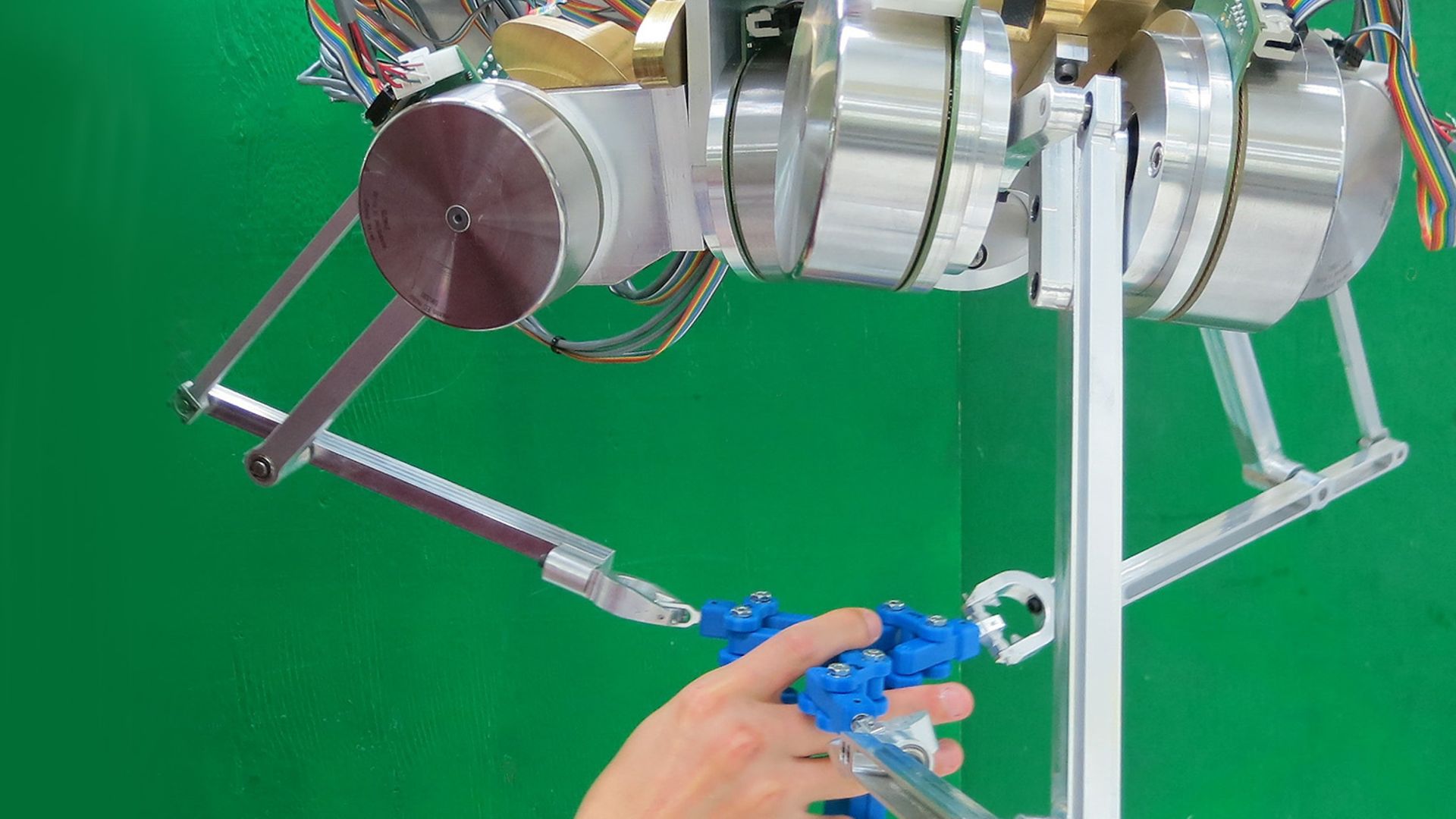
拉瓦爾大學的研究人員則採用了不同的方法。他們提出一種基於並聯架構的協作式機器人,如此可以大幅減少運動慣量,並且可以將執行器安裝在底座上或附近;如此便能採用直驅式執行器,進而以機械方式反向驅動機器人,不需再依賴力/轉矩感應器。為了能夠在沒有減速機的情況下仍提供足夠的轉矩,此處採用了數顆高轉矩 EC 90 flat 盤式馬達。機器人腿內設置了砝碼,以便降低執行器處的靜態轉矩。擁有機械式反向驅動能力的機器人因此能夠實現不費力且直覺化操作的物理性人機互動。此外,還可以搭配使用簡單高效的控制器。機器人的設計結構也允許從底座執行器操作抓手,這又是另一個好處。歸功於本身的反向驅動能力、低運動慣量和直驅式動力傳輸,這種機械手臂的靈活度不亞於人類手臂。因此,正如您在此處影片中所看到的,這款機器人尤其有助於輕鬆實現直覺靈活的高頻寬物理人機互動。