maxon Story
ALLEX, 人型機器人的全新典範


從感測指尖僅 100 公克的微小施力,到以鉤握方式提起超過 30 公斤的重量,ALLEX 結合了近似人類的靈巧度、力量與安全互動能力,重新定義人形機器人的可能性。
WIRobotics 以「Technology for People, Enhancing Quality of Life」為願景,專注於開發以人為本、安全且精準的人形及穿戴式機器人,是該領域的領導企業之一。
公司設立於韓國技術教育大學(Korea University of Technology and Education)內,並營運「Robotics Innovation Hub」機器人創新中心,匯集學術與產業夥伴,共同驗證、交ㄌ由並推動新興機器人技術的實際應用。
maxon 與 WIRobotics 已建立策略合作夥伴關係,共同開發並驗證核心驅動技術。同時,WIRobotics 亦持續透過與國內外頂尖研究機構的合作,提升技術能量。基於這樣的理念,WIRobotics 開發出人形機器人 ALLEX,目標是達成人類的操作與互動能力。
ALLEX 提出了全新的研究方向 — 「超越動作,邁向互動(Beyond Motion, Toward Interaction)」,並成為推動 Physical AI 研究的基礎平台。
為達成 ALLEX 在靈活度、精準度與安全互動上的核心目標,WIRobotics 整合 maxon 的高精度馬達與其自家減速機技術,打造出超越傳統馬達方案的高性能驅動模組。
重新思考「接觸」
數十年來,機器人設計的核心原則是「避免接觸」。傳統機器人視身體接觸為「碰撞」,是危險且必須避免的情況。然而,人類的生活與工作卻充滿接觸:我們握手、共同搬運物品、在碰撞時即時調整動作。
ALLEX 的設計選擇了截然不同的道路。它不僅不避開接觸,反而主動接觸,並能精準感測與回應互動過程中產生的力量。如此一來,「接觸」不再是錯誤,而是一種能力來源。
這項基本觀念的轉變,從「避免接觸」到「運用接觸」,使 ALLEX 不只是另一台人形機器人,而是互動導向機器人世代的基礎。
手臂:輕量、高順應性、可回驅設計(Backdrivable)
WIRobotics 追求的回驅性,無法透過市售驅動模組達成。因此團隊決定自行開發,使摩擦力降至一般減速機的 1/10 、1/24 的慣量。
ALLEX 的手臂採用最佳化的回驅結構,兼具人類手臂的敏捷度與互動時的安全順應性。
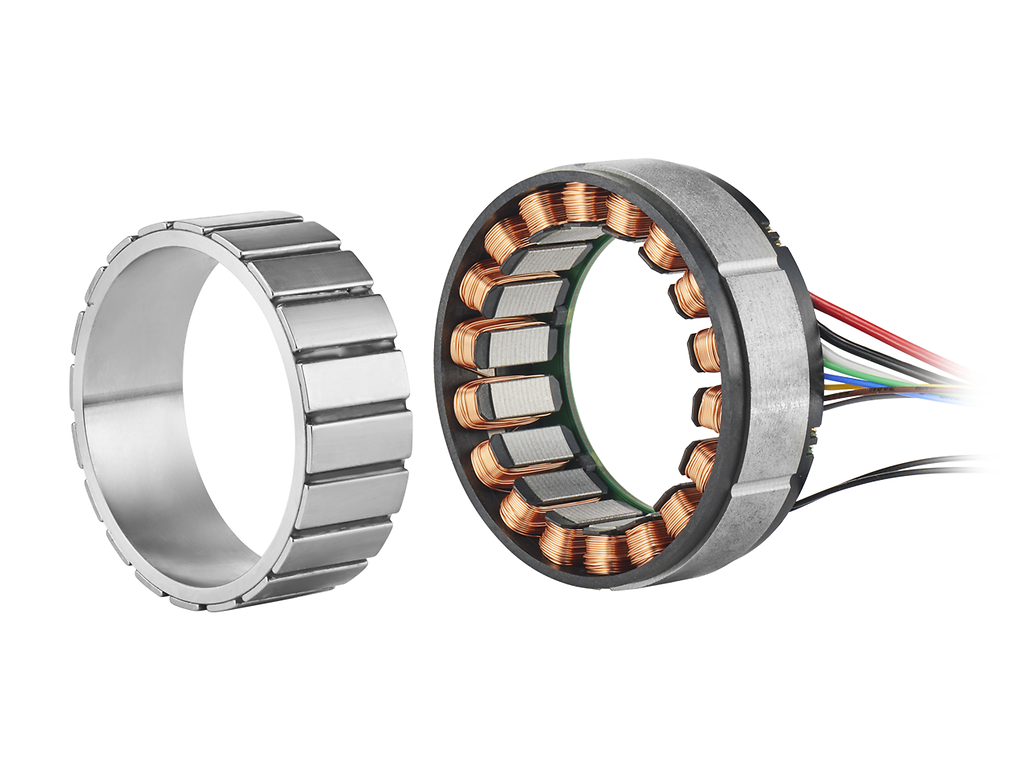
其核心為 maxon 在韓國開發與生產的 超薄無框馬達(frameless motor),在纖薄的體積中仍具備高扭矩,非常適合應用於有限空間內的高效驅動系統。結合 WIRobotics 的減速機後,整體摩擦與轉動慣量極低,大幅提升手臂的靈活度與回驅性能。

七個執行器中,有五個配置於肩部附近,有效降低遠端慣量並提升末端反應速度。使肩部以下總重量僅約 5 公斤,在速度、安全與力量之間取得完美平衡。
雙手:人類般的靈巧度,精簡尺寸下的強大性能
ALLEX 的雙手皆具備 20 個關節、15 個主動自由度,尺寸與人手相同。
六個 高輸出執行器 配置於前臂,負責力量輸出;而負責精細動作的 小型執行器 則整合於手掌內,使力量與精準度能高效分配。


maxon 的精簡型馬達具備高轉速、低震動與低發熱的特性,確保優異的扭力傳遞效率。同時,手部高度回驅的結構,能靈活應對外力,維持自然且精準的動作控制。
ALLEX 的手部性能包括:
- 無需觸覺感測器即可偵測 100 g 外力
- 指尖施力可達 40 N
- 可穩固操控 3 公斤負載
- 以鉤握方式提起超過 30 kg 的重量
在強大性能之下,ALLEX 的手仍維持輕量與人類比例,是下一代人形機器手的全新標準。
腰部與頸部:被動式重力補償
ALLEX 的腰部與頸部皆具備兩個自由度,並採用被動式重力補償機構。無論雙臂姿態或負載如何改變,腰部皆能自然平衡整個上半身重量。

透過機械方式中和重力後,關節僅需極小扭力極可運作,達成安全、順應且高效能的表現。同時降低長時間運作對馬達的負擔。
系統整合:即時全身協調
ALLEX 全身共具備 48 個自由度,透過 EtherCAT 高速通訊與 WIRobotics 的自製控制器協調運作。此架構能讓從指尖到軀幹的所有關節同步運作,達成全身即時協調控制。
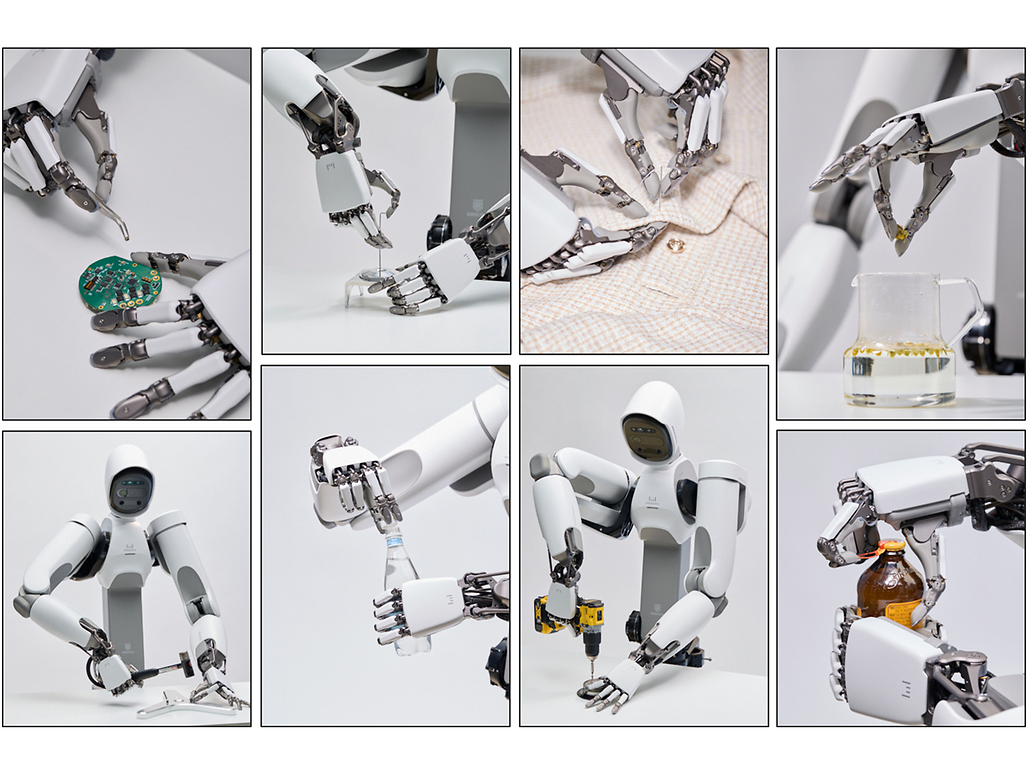
其雙手可完整呈現人類等級的操作範圍,從微型組裝、縫紉等細膩作業,到高力量的鑽孔、開瓶與日常任務。憑藉 20 個關節與高度回驅的驅動器系統,手部可在精準、速度與力量間流暢切換,呈現真正的人類般靈巧度。
ALLEX:Physical AI 研究平台
ALLEX 不僅展示人類般的靈巧能力,更被設計為下一代 Physical AI 的標準研究平台,讓大學與先端研發團隊能在單一系統上研究動作學習與物理互動。研究人員可在 ALLEX 上探索高接觸任務,結合強化學習、模仿學習與新興的機器人基礎模型(robot foundation models),研究機器人如何學習「互動的物理本質」。
從溫柔抓握到動態施力
ALLEX 的高自由度靈巧雙手,能在精細操作與高衝擊任務間自然切換:縫扣子、拉瓶蓋、使用 L 型扳手鎖螺絲、甚至揮動鐵鎚。這種同時具備高敏感度與高輸出力量的能力,補足了機器人長期以來的關鍵缺口。ALLEX 的高透明度(mechanical transparency)與高度回驅驅動器,讓整個操作鏈(手臂、手腕、手指)皆可展現即時回應能力,重現完整的人類操作範圍。
超越:邁向以互動為核心的機器人
在當今的機器人研究中,各種方法正被積極探索,包括強化學習、模仿學習以及基於 VLM/VLA 所發展的機器人基礎模型。然而,這些方法仍未帶來如同大型語言模型在 AI 領域帶來的突破性影響。
關鍵原因在於研究重心仍偏向「動作」,而非「互動」。這並非研究人員忽略了互動的重要性,而是長期以來,缺乏能像人類一樣自然互動、同時又能精準感知互動力量的機器人平台。
在缺乏真正具備互動能力的機器人之前,機器人技術的進展將受限於「動作層面」,而難以跨越智更高層次的智慧協作。
重新定義人形機器人的未來
ALLEX 不只是一台機器人,更代表了人機協作的未來樣貌。它重新定義了機器人如何學習、適應與互動,成為真正的 Physical AI 的活躍平台。
這項願景的核心,是 WIRobotics 的創新設計與控制技術,加上 maxon 高精密驅動方案,全面提升 ALLEX 的完整性與可靠性。
從指尖的細膩動作,到平衡的腰部與靈活的頸部,ALLEX 的每一個細節都展現了 WIRobotics 與合作夥伴之間的技術協作成果。
在此技術基礎之上,maxon 與 WIRobotics 將持續深化合作,攜手開創人機共存、自然互動的新時代。
ALLEX 正從單純的「機器人」,邁向真正會學習、感知、真正與人互動的智慧夥伴。