maxon Story
Robotic surgery: a cure for NHS wait times?

According to the NHS, 9 in 10 of all keyhole surgeries will be delivered with the assistance of robotics in the next 10 years. To meet this demand, surgical robot manufacturers are looking for streamlined development processes, combined with increasing surgical precision. Optimising joint design, responsible for controlling these robots, will be a key focus. Matthew Dean, medical technology lead at drive system manufacturer maxon, reports.
In June, the NHS reported that millions of patients will benefit from cutting-edge NHS robotic surgery over the next decade as part of plans to cut waiting times . The NHS said that half a million operations will be supported by robotic surgery every year by 2035, up from 70,000 in 2023/24.
The range of operations involving robots has also widened, and in addition to the treatment of urological cancer, there has been significant growth in colorectal, gynaecology, ear, nose and throat procedures, as well as orthopaedic treatment.
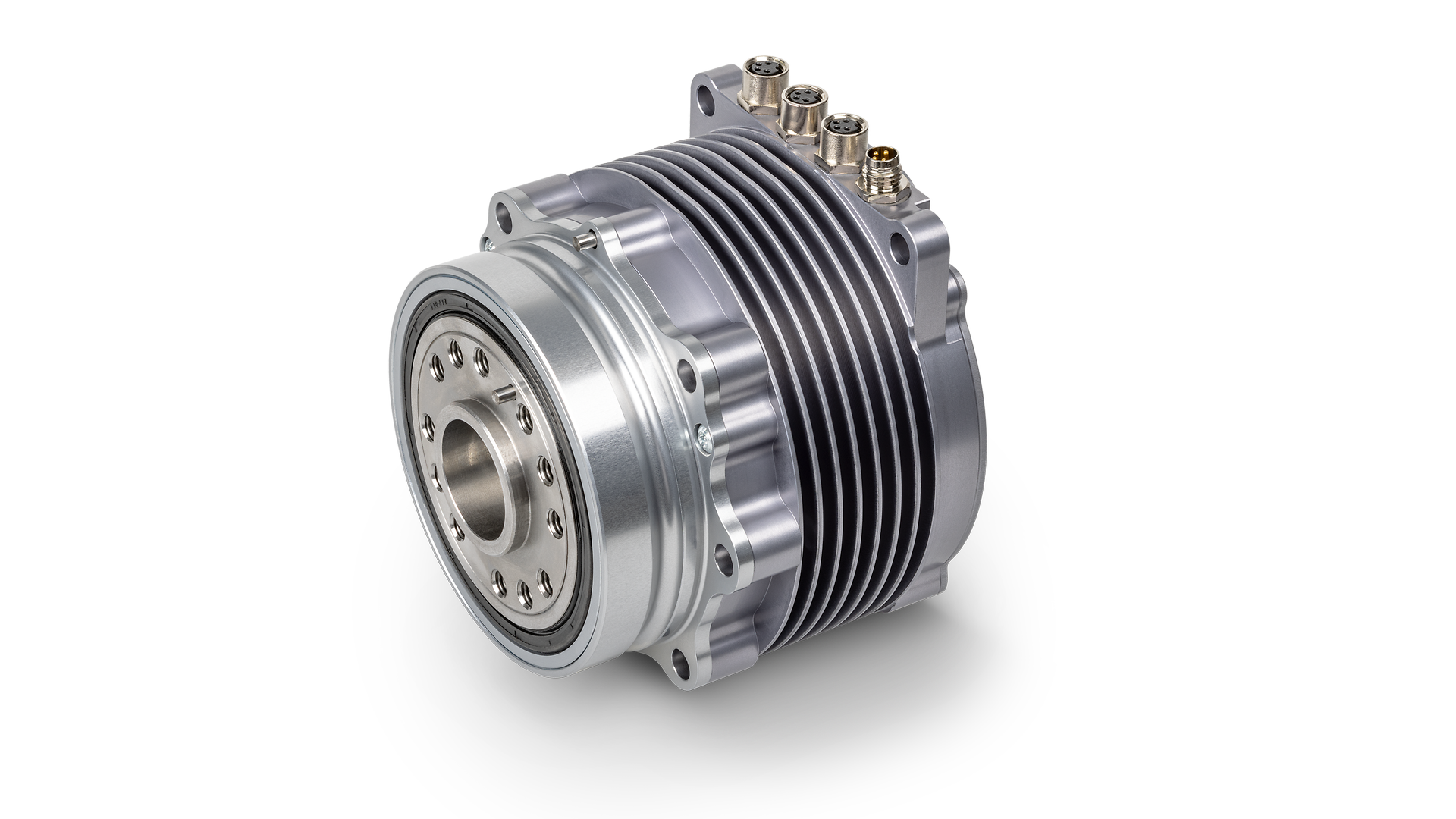
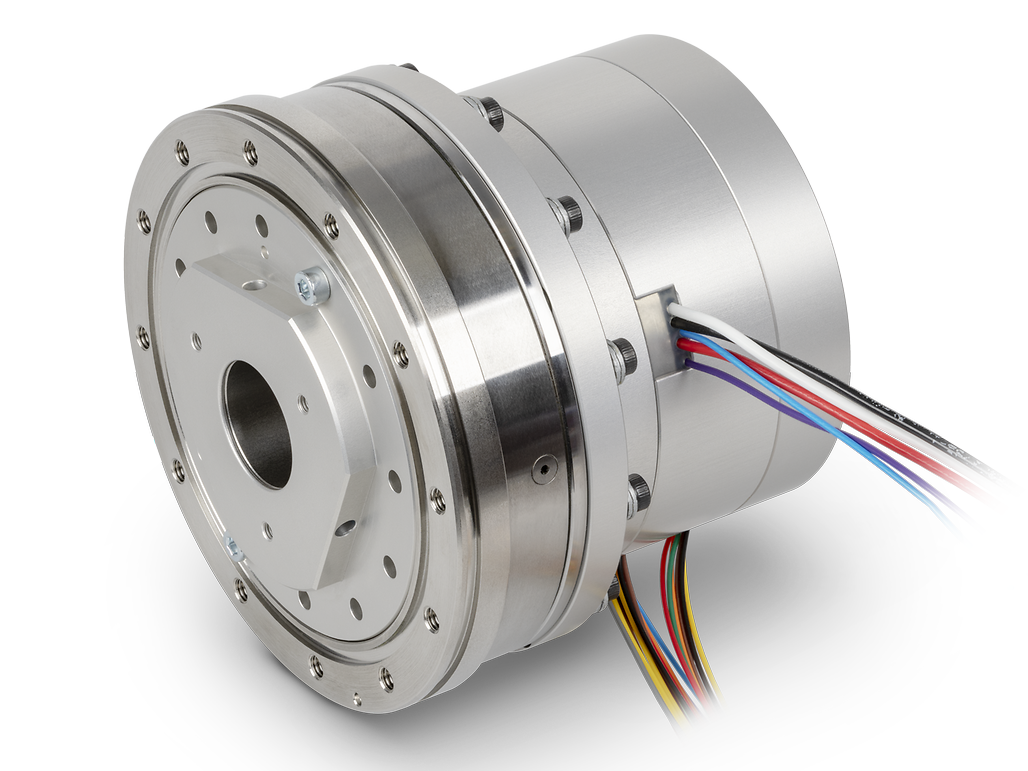
Key to the accelerated growth in robotic surgery are the joints responsible for the precise, controllable movements that surgeons rely on. This involves micron-level motion, with smooth control repeated across every move of each joint. Surgical robot joints comprise an electric motor as well as a gear to achieve the required torque and speed. The joint also integrates encoders to report the position of the motor, and a brake is often necessary to hold the movement.
These components are packaged into a single, housed unit to optimise integration and ensure a compact fit, characterised by a hollow central shaft allowing cable routing within the robotic arm. Connected to the joint, or sometimes integrated within it, a controller regulates the speed and position of the motor, or potentially several motors combined.
From in-house development to motion engineering expertise
Previously, surgical robot designers developed their joints, enabling them to achieve the performance and characteristics specifically required for the target surgical procedures. Now, the trend for robot developers is to procure a robotic joint as a complete assembly from a specialist manufacturer. This not only saves robot OEMs significant time in design, test, and conformance, but it can also enhance robot performance.
Specifying a robot joint begins with the motor. Surgery demands precision, so while high-speed movement isn’t necessary, the requirements are based on torque and its control. Given for the rise of robotic surgery, the key-hole approach doesn’t demand relatively high torque; however, the load of the robot arm itself must be handled, in a series of brief, precise, and smooth movements, with the shoulder joint requiring the highest torque compared to the distal joints of the arm. This also means a need for high intermittent torque rather than continuous duty operation. But to achieve a compact robot design and minimise the inertia of the robot arm, high torque density is crucial.
As a result, a brushless DC (BLDC) motor is the obvious choice, mainly due to its high power density. A BLDC motor design is also more thermally efficient, which increases torque density and enables a more compact footprint.
A BLDC motor also means three phases, and not only does this further increase torque-density, but it also achieves smoother motion for greater control precision, resulting from the increased torque overlap of the winding phases. In combination, a dynamic design that enables precise shaft control is also necessary, characterised by low rotor mass and low-friction rotation.




Robotic surgical system in operation
Optimising torque-density
The ideal form factor of the motor features a hollow shaft, allowing the passage of cabling through the central bore, with the stator surrounding the rotor in a frameless design that achieves compact integration within the confines of the joint. The motor can also be based on a ‘flat’ configuration, reducing length within the confines of the arm.
As high-speed operation isn’t usually a factor, to optimise torque and reduce speed, a gear head is required. The gear has a major importance in control precision because of backlash, the free movement between gear teeth when motion is stopped or direction changed. Even a fractional degree of backlash, particularly when multiplied across the joints, can result in an unacceptable deviation.
The strain wave gear achieves zero backlash as the teeth remain in constant engagement. This design is based on elastic deformation, where a flexible cup is deformed by a ‘wave generator’, which squeezes it into an ellipse, causing its teeth to engage progressively and continuously with a rigid, outer toothed ring. This design also means that strain wave gearheads can be easily back-driven, allowing a robotic arm to be manually moved when the system is powered off, advantageous for manual robot teaching purposes as well as safety.
Precision control is vital
The strain wave design is light and compact, achieving a taller but flatter footprint than a planetary gear, which integrates well with a flat, frameless BLDC motor. The downside is lower stiffness compared to a planetary design, but in robotic surgery, consistent tool behaviour is more important than stiffness, especially as high-speed motion isn’t required. To compensate, designers can apply control algorithms with torque sensing throughout the motion cycle of each joint.
Encoder resolution is a key aspect of control precision, and a joint for surgical robots should include an encoder on the rotor, as well as an encoder on the output. While the commutation encoder communicates the position of the rotor to the drive electronics, optimising current control with the required speed and stability, the absolute encoder senses the position of the shaft, providing the true position of the output for precise surgical tool positioning. A 19-bit absolute encoder on the output ensures a robot can achieve extremely fine joint movements for delicate surgical procedures.
An absolute encoder also retains its position even during an unplanned power loss, which is a crucial safety factor for surgical procedures. During operation, a holding brake is sometimes required. Based on a permanent magnet design, a holding brake ensures that joints stay safely in position whenever the motors are not actively powered for motion, also adding an additional safety factor in the event of power loss.
To control the motion of a robotic joint, including its position and speed, a controller is also required, either for each joint or to coordinate all the joints in the arm with a multi-axis capability. Along with the capability to programme and command the variety of moves necessary for each joint, right down to the end effector, they must be executed at high speed to optimise their coordination. This means a reliance on fast processors and high-speed communications protocols, such as EtherCAT.
Involving motion engineering expertise at the outset
Considering the variety of design options across each component within a robotic joint, specification is significantly faster and simpler with the input of drive system engineering expertise. Factors ranging from torque requirement and motor diameter, through to the final cable connections at installation, often have interconnected design implications.
Engaging with motion engineers at an early stage of robot design will not only make joint specification significantly faster, but considering the fundamental role that the joints play, it can also streamline the robot’s overall development process. Ultimately, the exacting demands in control precision required by a surgical robot mean that dedicated motion engineering expertise can help to improve the patient outcome.
Contact Matthew Dean to discuss your medical application on matthew.dean@maxongroup.com or 01189 733 337.