Young Engineers Program
Agile collaborative robot

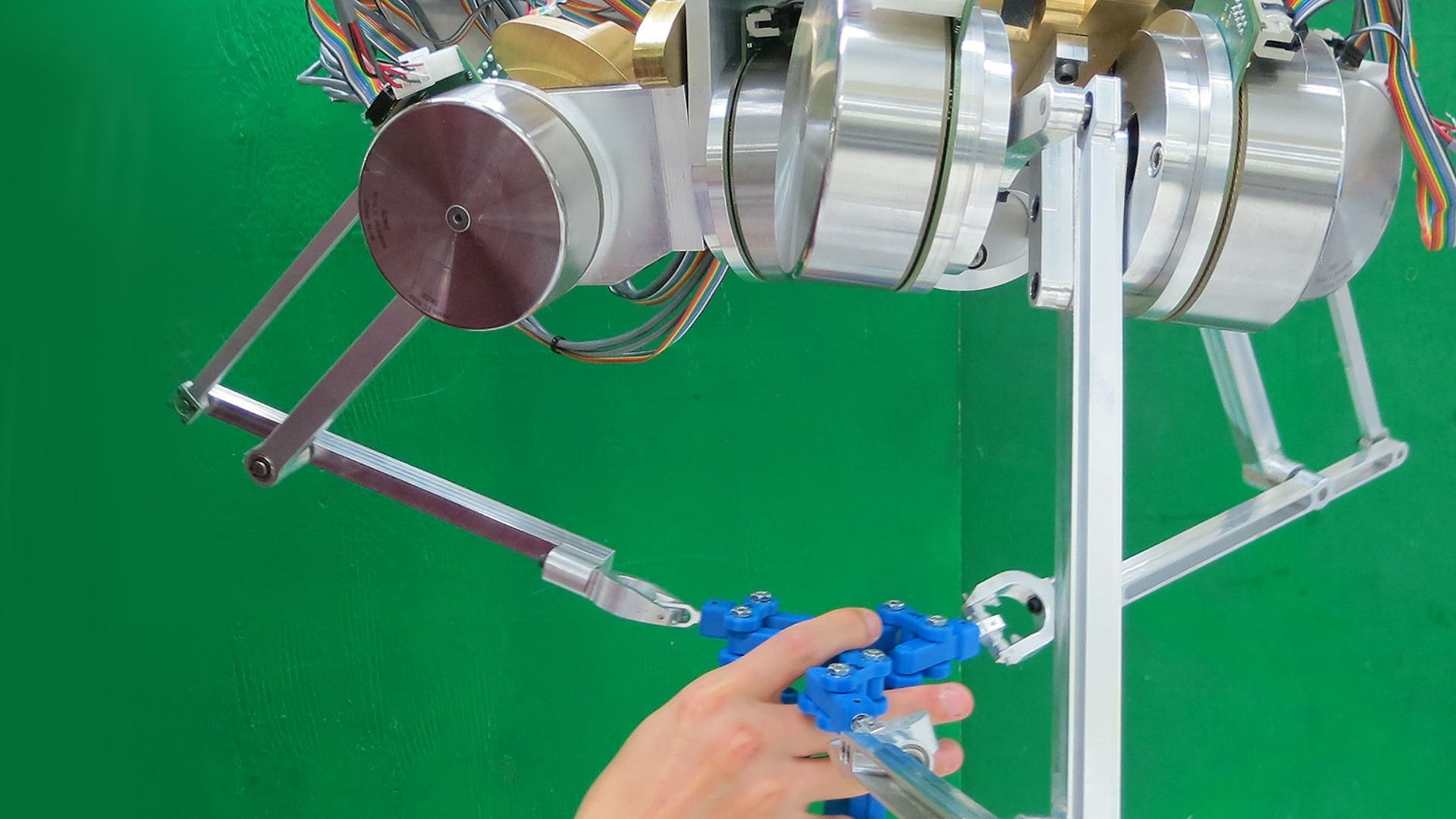
Canadian researchers at Université Laval develop a novel collaborative robot that can match human agility.
Collaborative robots (cobots) are robotic arms that can be manipulated directly by human users to allow the teaching of tasks without having to use complex programming interfaces. Commercially available cobots are based on serial architectures. They use actuators with large reduction ratios and they are therefore not mechanically backdrivable. Force/torque sensors provide the reactions to the forces applied by human users on the robot. As a consequence, such robots cannot match human agility, which makes their use rather unnatural in human-guided tasks.
Researchers at Université Laval have taken a different approach. They propose a collaborative robot based on a parallel architecture, which considerably reduces the moving inertia and allows the placement of the actuators on or close to the base. Direct-drive actuators can then be used, which makes the robot mechanically backdrivable and eliminates the need to resort to force/torque sensors. In order to provide sufficient torque in the absence of gearheads, high-torque EC 90 flat motors are used. Counterweights are included in the robot legs to reduce the static torques at the actuators. The mechanical backdrivability of the robot yields an effortless and intuitive physical human-robot interaction. Moreover, it allows the use of a very simple and effective controller. The architecture of the robot also makes it possible to operate a gripper from the base actuators, which is an additional benefit. Because of its backdrivability, low moving inertia and direct-drive transmission, the robot can match the agility of the human arm. It is therefore particularly well suited for effortless intuitive agile high-bandwidth physical human-robot interaction, as demonstrated in the accompanying videos.