maxon Story
Schöne neue Unterwasserwelt.

Am Robotics Innovation Center in Bremen befassen sich Ingenieur:innen mit Unterwasserrobotern. Diese sollen uns helfen, die Weltmeere besser zu verstehen. Und in Zukunft auch die tiefen Wasser fremder Planeten.
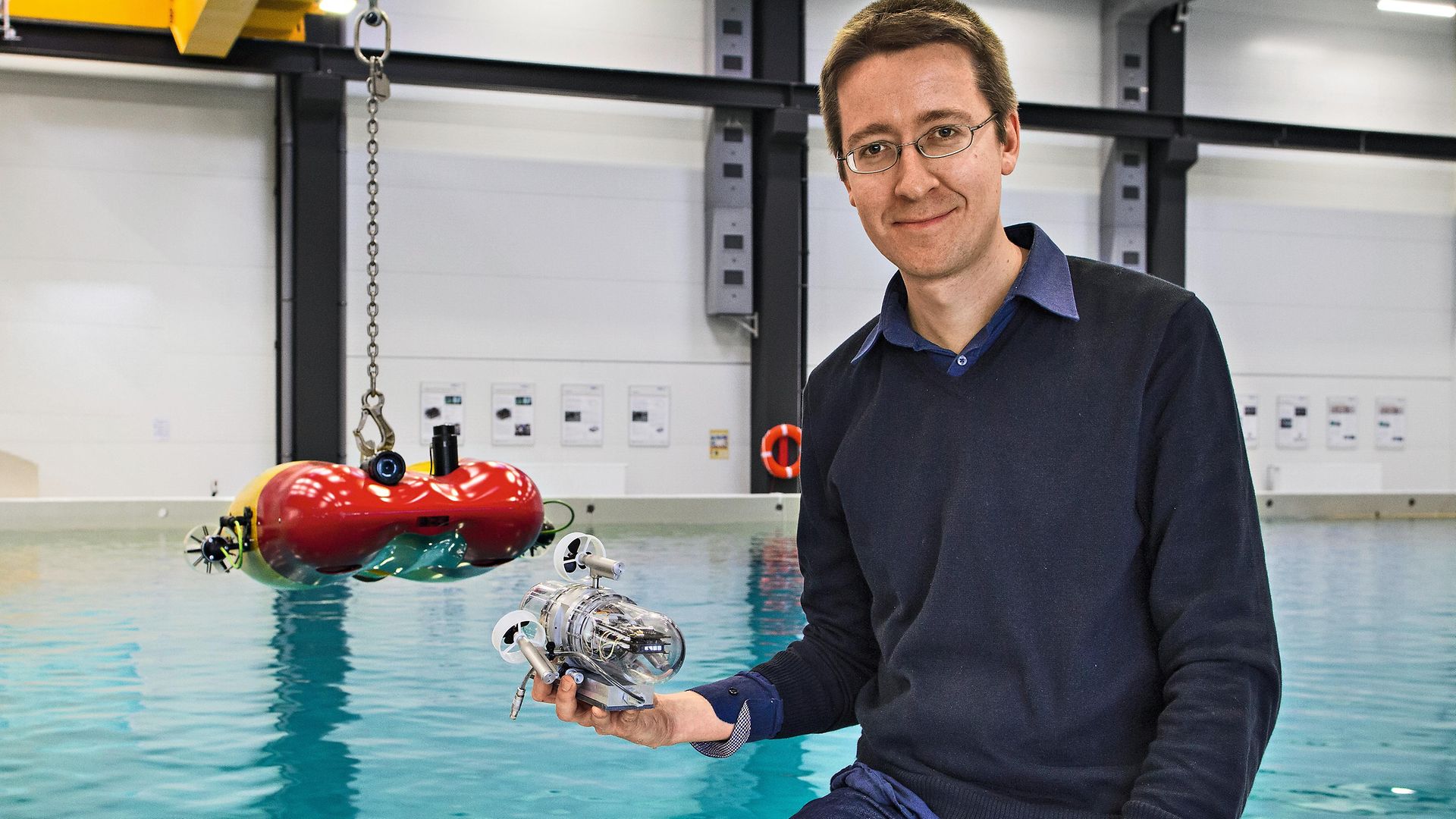
Die Leidenschaft der Ingenieur:innen erkennt man am Weihnachtsbaum, der den ganzen Dezember am Boden des grossen Wasserbeckens steht. Gut sichtbar für alle Besuchenden des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) in Bremen. Die Weihnachtskugeln zieht es wegen des Auftriebs nach oben. Eine Lichterkette sorgt für die passende Beleuchtung – mit 230 Volt. Aber keine Angst. Die Forschenden wissen, was sie tun. Unterwassertechnologie ist ihr Spezialgebiet. Den besagten Weihnachtsbaum haben sie aus Spass an der Arbeit nach Feierabend hergerichtet. «Bei den hervorragenden Bedingungen hier am Institut ist die Motivation, innovative neue Wege auszuprobieren, besonders hoch. Da bleibt man gerne auch mal länger», sagt Peter Kampmann, wissenschaftlicher Mitarbeiter und Spezialist für Unterwasserrobotik am DFKI Robotics Innovation Center.
Kampmann führt uns durch die grosse maritime Explorationshalle des DFKI. Hier befindet sich eine europaweit einmalige Testanlage für Tauchroboter: ein Salzwasserbecken mit einer Tiefe von acht Metern und einem Fassungsvermögen von 3,4 Millionen Litern. Perfekt geeignet, um neue Unterwassersysteme zu testen, die Schiffe und Pipelines inspizieren, unbekannte Gewässer erkunden oder Messungen in der Tiefsee durchführen.
Lange hat der maritime Sektor nur ein Schattendasein geführt. Nach wie vor sind zum Beispiel grosse Teile der Tiefsee nicht kartografiert. Wir wissen also nicht, wie es da unten, in 3 000 bis 6 000 Metern, genau aussieht. Sogar von der Marsoberfläche gibt es genauere Karten. Doch in den nächsten Jahren soll sich das ändern – auch dank moderner Technologien. Das Robotics Innovation Center des DFKI arbeitet eng mit den Ingenieur:innen von maxon zusammen an neuen Unterwasserantrieben mit bürstenlosen DC-Motoren. Diese sind druckkompensiert, kompakt sowie energieeffizient und ideal geeignet für ROVs (Remote Operated Vehicles, ferngesteuerte Fahrzeuge) und AUVs (Autonomous Underwater Vehicles, autonom agierende Unterwasserfahrzeuge). Es ist eine Entwicklung, die Peter Kampmann und seinen Kolleg:innen gelegen kommt. Denn: «Mit neuen Komponenten, die leichter und leistungsstärker sind, ergeben sich für uns ganz neue Möglichkeiten.»
Der Eisbärenvergleich
Der Trend in der Unterwassertechnologie geht in Richtung «klein und intelligent». Ingenieur:innen bauen heute Fahrzeuge, die mit Sensoren und Elektronik ausgestattet sind. Die Maschinen sollen in der Lage sein, ohne menschliches Zutun monatelang zu forschen, Daten zu sammeln und auf verschiedene Szenarien selbstständig zu reagieren. Keine einfache Aufgabe bei solch harschen Umgebungsbedingungen. Denn im Meer herrschen schlechte Sichtverhältnisse, und im Wasser werden Wellenlängen, die für GPS- oder WLAN-Signale genutzt werden, schnell absorbiert. Das macht die Navigation schwierig. Das Salzwasser greift zudem die Komponenten an, zerfrisst sogar Edelstahl nach einer bestimmten Zeit. Heikle Teile wie Motorwellen sollten deshalb aus Titan sein. Und nicht zuletzt ist da der grosse Umgebungsdruck. In 6 000 Metern Tiefe herrschen 600 bar. Das ist in etwa damit vergleichbar, wenn ein ausgewachsener Eisbär auf einer Fläche von nur einem Quadratzentimeter sitzt. Das Robotics Innovation Center kann solche Werte in einer Druckkammer simulieren. Auch maxon hat seine speziell entwickelten Unterwasserantriebe hier prüfen lassen. Komponenten, die in 6 000 Metern Tiefe bestehen, können in über 95 Prozent der Weltmeere eingesetzt werden.
Jedes Gramm spielt eine Rolle
Auf dem Spaziergang durch das Robotics Innovation Center des DFKI stossen wir auf mehrere Unterwasserfahrzeuge. Etwa das Micro-AUV. Wie der Name schon sagt, ist dieses besonders klein und wird von den Forschenden eingesetzt, um neue Ansätze zur Steuerung und Navigation zu testen. Alles an diesem Fahrzeug muss darauf ausgelegt sein, einen möglichst geringen Restauftrieb zu erreichen. Jedes zusätzliche Gramm an Abtrieb spielt unter Wasser eine Rolle. Denn sollte ein System einmal ausfallen, muss es durch eine positive Tarierung an die Oberfläche steigen, sonst ist es für immer verloren. Angetrieben wird das Micro-AUV von vier DC-Motoren von maxon. Es sind besonders energieeffiziente Antriebe, damit trotz kleiner Batterie eine lange Lebensdauer möglich wird.
Bald schon auf dem Jupitermond?
Ein weiteres spannendes Projekt des DFKI ist der Europa-Explorer, ein Unterwassererkundungsfahrzeug, langgezogen wie eine dünne Zigarre. Fernziel ist die Erkundung des Jupitermondes Europa. Dieser ist mit einer 3 bis 15 Kilometer dicken Eisschicht bedeckt, unter der sich wohl ein Ozean befindet. Das DFKI erforscht im Auftrag des Deutschen Zentrums für Luft- und Raumfahrt (DLR) das Potenzial einer solchen Mission. Das AUV würde dafür – so die aktuelle Theorie – im Innern eines Bohrers bis zum unterirdischen Ozean gelangen, sich dann ausklinken, selbstständig Daten sammeln und diese danach zur Erde schicken.
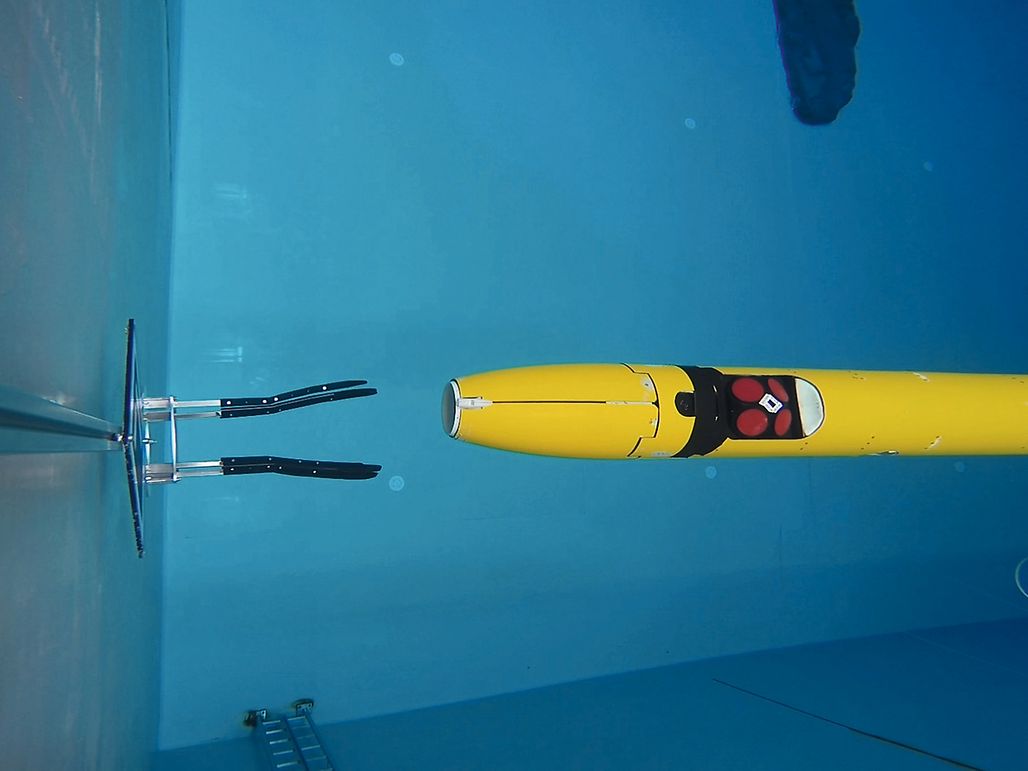
Der Europa-Explorer soll zur Erkundung des Jupitermondes Europa eingesetzt werden.
Im aktuellen Testtyp am DFKI steckt eine maxon Motorsteuerung ESCON Module 50/5. Sie ist besonders wegen ihrer Dynamik und Assistenzfunktion beliebt. «Die Steuerung erkennt Fehlerquellen selbstständig, was die Arbeit für uns angenehmer macht», sagt Peter Kampmann. Und so zeigt sich nach dem Besuch am DFKI: Das Gebiet der Unterwasseranwendungen wird nicht länger von grossen, robusten Komponenten und Improvisationen geprägt. Sensorik, Automatisierung und Robotik haben Einzug gehalten. Eine vielversprechende Ausgangslage für die Zukunft.
Zentrum für Robotik
Das Deutsche Forschungszentrum für Künstliche Intelligenz (DFKI) ist die führende Einrichtung in Deutschland auf dem Gebiet innovativer Softwaretechnologien auf der Basis von Methoden der Künstlichen Intelligenz. An verschiedenen Standorten sind über 800 Mitarbeitende beschäftigt. Am Robotics Innovation Center in Bremen arbeiten rund 130 Mitarbeitende und 80 Studierende an jeweils 25 bis 30 Projekten, die sich mit Robotern im All oder in der Tiefsee befassen.
Spezialantriebe für die Tiefsee
maxon motor wagt sich in die dunklen Tiefen der Meere. Nach zweijähriger Entwicklungszeit präsentiert der Schweizer Antriebsspezialist eigene Unterwasserantriebe. Diese Thruster bestehen aus einem bürstenlosen DC-Motor, einem Getriebe sowie einer Steuerung. Hinzu kommen das Gehäuse und ein Propeller. Die Einheit ist für den Einsatz im Meerwasser konzipiert, hält dem Druck in 6 000 Metern Tiefe (600 bar) stand und ist korrosionsbeständig.
Um dies zu gewährleisten, hat maxon hauptsächlich Titan und Kunststoff verwendet. Bei der Entwicklung haben die Ingenieur:innen mit dem DFKI (Deutsches Forschungsinstitut für Künstliche Intelligenz) zusammengearbeitet. Das Institut ist auf Unterwasserfahrzeuge spezialisiert. Ein erstes Modell des Thrusters, der MT30, ist noch dieses Jahr als Standardprodukt erhältlich. Weitere Grössen (20, 40 und 70 Millimeter Durchmesser) sind geplant.

Ölgefüllt und druckneutral
Als Standardlösung für individuelle Unterwasseranwendungen bietet maxon ein druckkompensiertes Antriebssystem an. Herzstück ist eine Motor-Getriebe-Kombination, bestehend aus einem bürstenlosen DC-Motor sowie einem Planetengetriebe. Für den Korrosionsschutz wird der Antrieb mit einem Kunststoffgehäuse umhüllt und mit zwei Titanflanschen abgedichtet. Es gibt die Möglichkeit, einen Kompensator anzuschliessen.
Die ölgefüllte Antriebseinheit wird über einen Schlauch mit dem Kompensator verbunden. Dieser überträgt den Wasserdruck mit einer Membran auf das Öl, das je nach Wassertiefe bzw. Wasserdruck um ein bestimmtes Volumen komprimiert wird. Für den Anschluss einer Steuerungselektronik sind Steckverbindungen am Antrieb vorhanden. Der kompakte Unterwasserantrieb ist mit Durchmessern von 16 bis 42 Millimetern verfügbar und wird je nach Kundenanforderung individuell angepasst.

Ölgefüllter Unterwasserantrieb bestehend aus einem bürstenlosen DC-Motor, Planetengetriebe und einer Steuerung. Druckneutral bis 6 000 Meter Tiefe.
Bildrechte
maxon motor ag; DFKI