maxon Story
Leistungsdichte in der Robotik.

Eine Frage des Drehmoments – ob Inspektionsroboter für Röhren und Kanäle, Rettungsroboter in Katastrophengebieten oder Humanoid-Roboter, sie alle haben eines gemeinsam: Es sind mobile Roboter, die den Menschen unterstützen. Wir erklären einige Anforderungen an die Antriebstechnik im Detail.
Eine der wesentlichen Anforderungen an Antriebe mobiler Roboter ist eine hohe Leistungsdichte. Bei Robotern bedeutet dies in den meisten Fällen ein hohes Drehmoment auf möglichst kleinem Bauraum. Was die Drehzahl betrifft, genügen in der Robotik meist Drehzahlen von unter 1 000 min-1, auch für schnelle Bewegungen.
DC-Motoren: Hohe Leistungsdichte
DC-Motoren sind die erste Wahl, wenn es um eine hohe Leistungsdichte geht. Sie eignen sich wegen ihres hohen Anlaufmoments gut für Beschleunigungsaufgaben. Typische Beispiele für solche DC-Motoren sind die eisenlosen maxon Motoren mit und ohne Bürsten. Sie zeichnen sich durch einen hohen Wirkungsgrad aus. Diese schnell drehenden Motoren sind in der Regel lang und schmal, das Drehmoment ist eher gering. Um die in der Robotik geforderten hohen Drehmomente zu erreichen, werden sie mit Getrieben kombiniert.
Wenn eine lineare Bewegung mit hoher Kraft gefordert wird, kann eine entsprechend gestaltete Mechanik mit hoher Untersetzung die Vorteile von schnell drehenden Motoren noch immer ausspielen. Beispiele sind Spindeln mit kleiner Steigung und Seilantriebe mit einer kleinen Umlenkrolle.
Mehrpolige Motoren: Höheres Drehmoment
Höhere Drehmomente können erreicht werden, indem mehr Magnetpole eingesetzt werden. Die EC-4pole-Motoren von maxon sind ein erster Schritt in diese Richtung. In diesem Fall bedeuten zusätzliche Magnetpole auch ein komplexeres Design sowie einen aufwendigeren Zusammenbau. Herkömmliche vielpolige, bürstenlose Gleichstrommotoren sind oft mit einem genuteten Eisenkern ausgeführt. Sie geben die Leistung tendenziell bei einem höheren Drehmoment und einer tieferen Drehzahl ab.

Robotikantriebe: Kleine Kraftpakete sind erforderlich Drei Aspekte sind entscheidend bei Motoren für Robotikapplikationen: ein hoher Wirkungsgrad, eine hohe Dynamik sowie eine hohe Leistungsdichte.
EC-Flachmotoren: Leistungsstark und preislich attraktiv
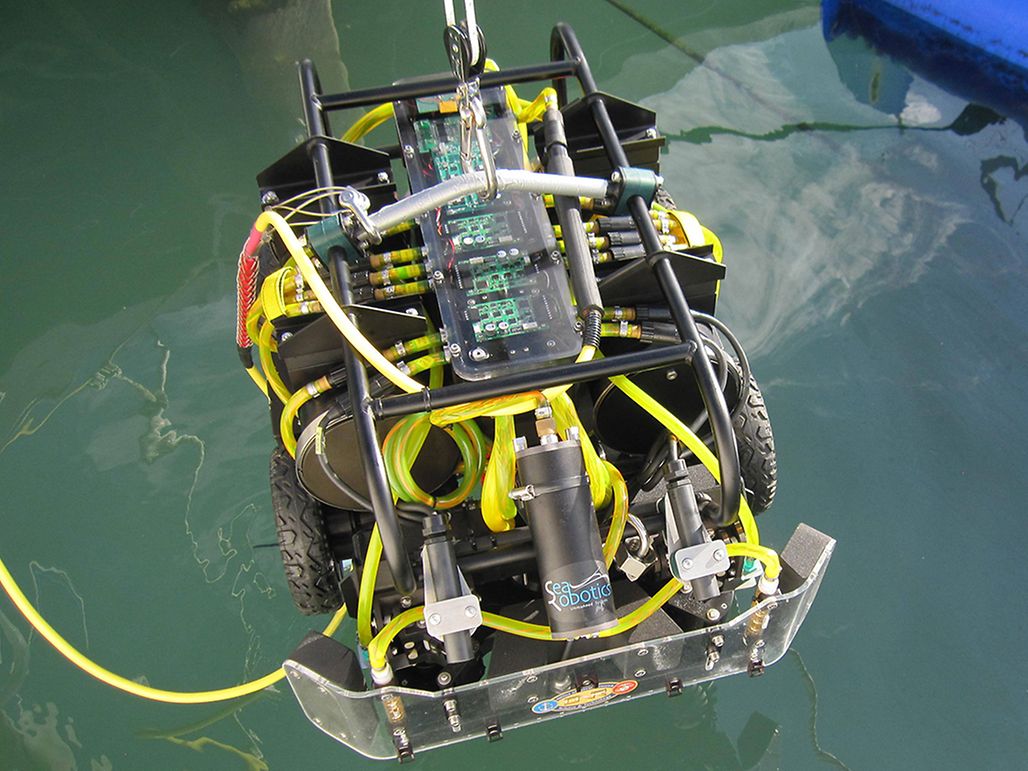
Die mehrpoligen maxon Flachmotoren kommen der idealen Lösung für Robotikanwendungen am nächsten. Diese Flachmotoren mit Aussenläufer erzeugen die Kraft auf grösstmöglichem Abstand zur Drehachse, was eine relativ hohe Leistungsdichte bei mittleren Drehzahlen ergibt. Das Trägheitsmoment des Rotors ist aber ebenfalls hoch, was die Dynamik einschränkt. Der Unterwasser-Reinigungsroboter Hullbug ist ein Beispiel für eine Applikation mit Flachmotoren. Bürstenlose EC-Flachmotoren sind wegen ihrer herkömmlichen, mehrzahnigen Wicklung mit Eisenkern und der Verwendung eines isotropen Permanentmagnetrings, der in einem Schritt magnetisiert wird, kostengünstig herstellbar. Der komplexe Zusammenbau des Magnetrings aus Einzelteilen ist somit überflüssig.
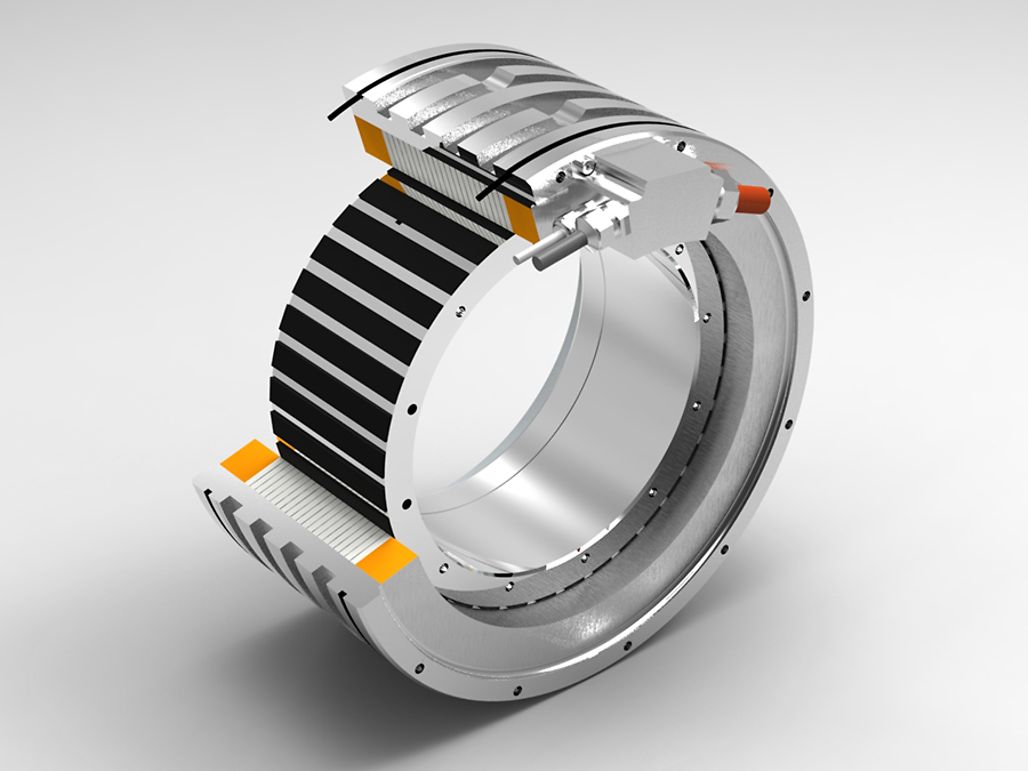
Die Vorder- und Rückansicht des EC90 flat. Der Unterwasser-Reinigungsroboter Hullbug ist ein Beispiel für eine Applikation mit Flachmotoren.


Torque-Motoren: Hohe Polzahl, aber teuer
Beispiele für Motoren mit sehr hoher Polzahl sind Torque-Motoren: langsam drehende, drehmomentstarke Elektromotoren mit Hohlwelle. Oft bestehen sie nur aus Rotor und Stator und werden in die Anwendung hinein konstruiert. Weitere Elemente wie Getriebe, Riemen, Kupplungen oder Lager können so eingespart werden. Diese spielfreien Direktantriebe kommen typischerweise in dynamischen Applikationen mit präziser Regelung zum Einsatz. Linearantriebe sind ein Spezialfall. Torque-Motoren benötigen aufgrund der vielen Pole hohe Schaltfrequenzen. Die dabei entstehende Wärme muss zudem über eine Wasserkühlung abgeführt werden.
Torque-Motoren erfüllen zwar die Anforderungen bezüglich Drehmoment und Dynamik von mobilen Robotikanwendungen perfekt, sie sind jedoch kostenintensiv, weil die Standardisierung fehlt und der Motor in die Konstruktion integriert werden muss. In Robotern werden deshalb bevorzugt modulare, flexible Motor-Getriebe-Kombinationen verwendet. Der Motortyp und die Bauform richten sich dabei nach den spezifischen Anforderungen an Leistung, Bauraum und – nicht zu vergessen – den Kosten.
Haben Sie Fragen? Setzen Sie sich mit unseren Fachleuten in Verbindung.