maxon Inside
Encoder-Wahl – Teil 3: Drehzahlregelung.

Eine allgemeine, ausführliche Analyse zeigt, dass für die sehr präzise Drehzahlregelung die höchsten Encoderauflösungen erforderlich sind. Die Encoderauflösung steigt quadratisch mit der erforderlichen Drehzahlgenauigkeit an. Zudem wird ein schneller Drehzahlregelkreis benötigt und ein hohes Trägheitsmoment wirkt sich positiv auf die Drehzahlstabilität aus.
- Bitte beachten Sie: Nicht nur die Auflösung des Encoders beeinflusst die akkurate und dynamische Drehzahlregelung, sondern die Reaktion des gesamten Systems. Die Reaktionszeit kann durch Strom- und Spannungsbeschränkungen der Stromversorgung bzw. der Steuerung, die Abtastfrequenz des Regelkreises, Trägheitsmomente, Reibungsunterschiede und mechanisches Spiel eingeschränkt werden.
Wie funktioniert die Drehzahlauswertung mit Inkremental-Encodern?
Die Drehzahl wird in der Steuerung ausgewertet, indem die Anzahl der Zustandsänderungen innerhalb eines bestimmten Zeitintervalls gezählt wird. EPOS2 weist z. B. eine Drehzahlreglerabtastfrequenz von 1 kHz auf. Die interne Drehzahl wird als Ganzzahl der Quadcounts pro Millisekunde (qc/ms) gemessen. Dies entspricht einer Drehzahlauflösung von 30 min-1 auf einem 500 cpt Encoder (2 000 qc pro Umdrehung). Je niedriger die Encoderauflösung, desto höher die Drehzahlquantisierung.
Hier ist zu betonen, dass es sich dabei aufgrund der digitalen Erfassung um ein messtechnisches Problem handelt – wie gemessen wird, nicht wie sich das System verhält. Die Ist-Drehzahl des Motors nimmt den Sollwert an und hält ihn infolge der mechanischen Trägheit (Schwungradeffekt) aufrecht. Nur die gemessenen Werte schwanken um die mittlere Drehzahl.
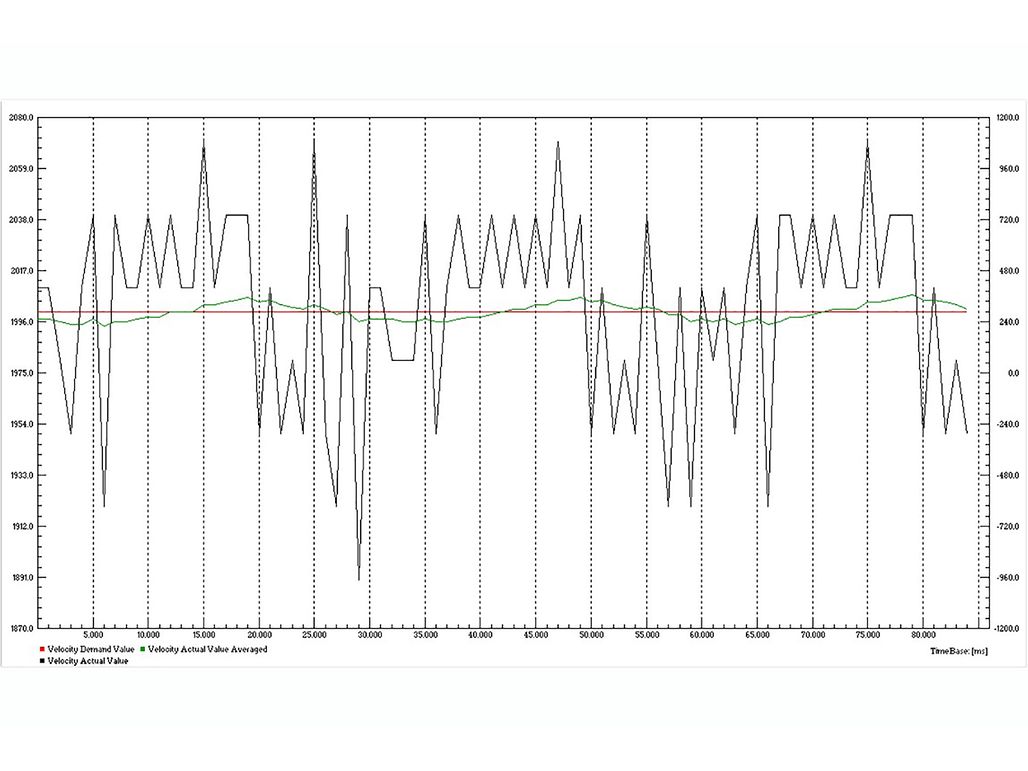
Aufgezeichnete Geschwindigkeitssignale eines Motors mit maxon MR-Encoder. (Screenshot des EPOS2 Studio Datenrekorders.) Die schwarze Linie stellt die ausgelesenen Drehzahlwerte des Sensors dar. Das Geschwindigkeitssignal springt entsprechend der Auflösung von 1 qc/ms in Schritten von 30 min-1 auf und ab. Zudem weist es eine Periode von 30 ms auf, die sich von der Dauer einer Motorumdrehung ableiten lässt. Die grüne gemittelte Geschwindigkeit zeigt das periodische Verhalten noch deutlicher. Das mittlere Drehzahlsignal ist näher an der tatsächlichen Drehzahl des Motors. In diesem Fall spiegelt es jedoch die Ungenauigkeiten des Encoders wider. Übrigens, die Drehzahlgenauigkeit des gemittelten Signals entspricht etwa 3 min-1 Abweichung bei einer Drehzahl von 2 000 min-1. Und das ist schon mal nicht schlecht!
Drehzahlregelung bei hohen Drehzahlen
Die elektronischen Bauteile des Encoders beschränken die maximale Impulsfrequenz, die verarbeitet werden kann, und somit auch die maximale Geschwindigkeit des Encoders selbst. In einigen Fällen lässt sich diese Einschränkung auf mechanische Gründe zurückführen, wie beispielsweise Unwucht und Montagetoleranzen.
Die Frequenzeinschränkungen am Encodereingang von Seiten der Steuerung sollten ebenso berücksichtigt werden. Wenn sehr hohe Drehzahlen erforderlich sind, muss eine entsprechend niedrige Encoderauflösung gewählt werden.
Eine relative Drehzahlabweichung von wenigen Prozent bei hohen Drehzahlen von einigen tausend Umdrehungen pro Minute entspricht mehreren 10 min-1 Absolut-Genauigkeit und ist sehr leicht zu erreichen.
Regel 4: Encoder für die Regelung hoher Drehzahlen (> 500 min-1)
Wählen Sie einen Encoder mit einer mässigen oder niedrigen Anzahl von Zuständen und einem ausreichend hohen Drehzahlnennwert. In vielen Fällen ist der maxon EASY Encoder die perfekte Lösung. Ein hochpräziser optischer Encoder ist normalerweise nicht erforderlich. Faustregel: (Drehzahl [min-1]) x (Encoderauflösung [cpt]) > 100 000 min-1 cpt ist bei weitem ausreichend für die meisten Applikationen.
Drehzahlregelung bei niedrigen Drehzahlen
Während das Zählen der Zustände bei hohen Drehzahlen zu einer guten Drehzahlregelung führt, wird diese Art der Drehzahlauswertung bei niedrigen Drehzahlen schwierig. Stellen Sie sich eine Drehzahl von 60 min-1 vor – dies entspricht einer Umdrehung pro Sekunde, die mit einer Genauigkeit von 5 % oder 3 min-1 gehalten werden muss. Mit dem gleichen 500 cpt Encoder und einer Regelzykluszeit von 1 ms wie oben, werden Sie niemals eine stabile und gleichmässig geregelte Drehzahl erhalten.
Um die absolute Drehzahlabweichung zu reduzieren, benötigen Sie eine höhere Encoderauflösung sowie eine schnellere Steuerung. Stellen Sie sich nun einen Encoder mit 5 000 cpt in der oben beschriebenen Situation vor. Sie erhalten das zehnfache an Feedback. Bei niedrigen Drehzahlen sollte zudem der Regelkreis schneller reagieren können, um die absolute Drehzahlabweichung klein zu halten. Beide Anforderungen erhöhen wiederum die Ansprüche an den Encoder. Die Encoderauflösung steigt quadratisch mit der absoluten Drehzahlstabilität an: Die Hälfte der erlaubten Drehzahlabweichung benötigt eine vierfach höhere Encoderauflösung.
Bei sehr niedrigen Drehzahlen ermöglichen manche Steuerungen eine alternative Methode der Drehzahlauswertung. Hier wird die Zeit gemessen, die zwischen zwei Zuständen verstreicht. Die Drehzahlfeedbackwerte sind homogener und erlauben damit eine steifere und dynamischere Steuerung.
Die EPOS4 Steuerung ermöglicht die Anwendung einer anderen Methode bei niedrigen Drehzahlen, Drehzahl-Beobachter genannt. Der Drehzahl-Beobachter ist ein Element des Regelkreises. Er berechnet die beobachteten Drehzahlen in zwei Schritten. Zuerst wird die Drehzahl, Position und das externe Drehmoment basierend auf den Parametern, die die mechanische Übertragungsfunktion des Systems definieren, vorhergesagt. Danach werden die vorhergesagten Werte basierend auf der neu gemessenen Rotorposition korrigiert.
Dennoch ist auch hier ein Encoder mit einer hohen Auflösung sowie einer schnellen Steuerung von Vorteil.
Regel 5: Encoder für die Regelung niedriger Drehzahlen (<100 min-1)
Wählen Sie einen Encoder mit einer hohen bzw. sehr hohen Anzahl von Zuständen in Kombination mit einer schnellen Steuerung.