maxon Story
Aerospace: maxon in orbit 400 km above the Earth.

The International Space Station (ISS) has been orbiting Earth for over 15 years. This international research station is used jointly by the American space agency NASA, the Russian space agency Roscosmos, the European Space Agency (ESA), and the space agencies of Canada (CSA) and Japan (JAXA).
Since it was commissioned in November 2000, a total of 295 astronauts have lived on board the space station, expanding it and working on a variety of research projects. More than 900 experiments initiated by 63 countries have been conducted since 2001. These include research on how plants orient themselves in zero gravity, why humans suffer muscle and bone loss in space, and how the cells of the human immune system react to a weightless environment. It is already known that the immune system of the astronauts weakens in space. “In fact, it is comparable with the weakened immune system in old age,” explained Alexandra Deschwanden, head of the Biotesc team of the Lucerne University of Applied Sciences and Arts. Early in January 2015, the team sent two research projects to the ISS on board the SpaceX Dragon capsule. Technical equipment, such as various laboratory devices, is essential for the experiments on board the ISS. Robots that can perform the tasks of astronauts or assist them also play a decisive role.
An experimental robot with a unique locomotion system
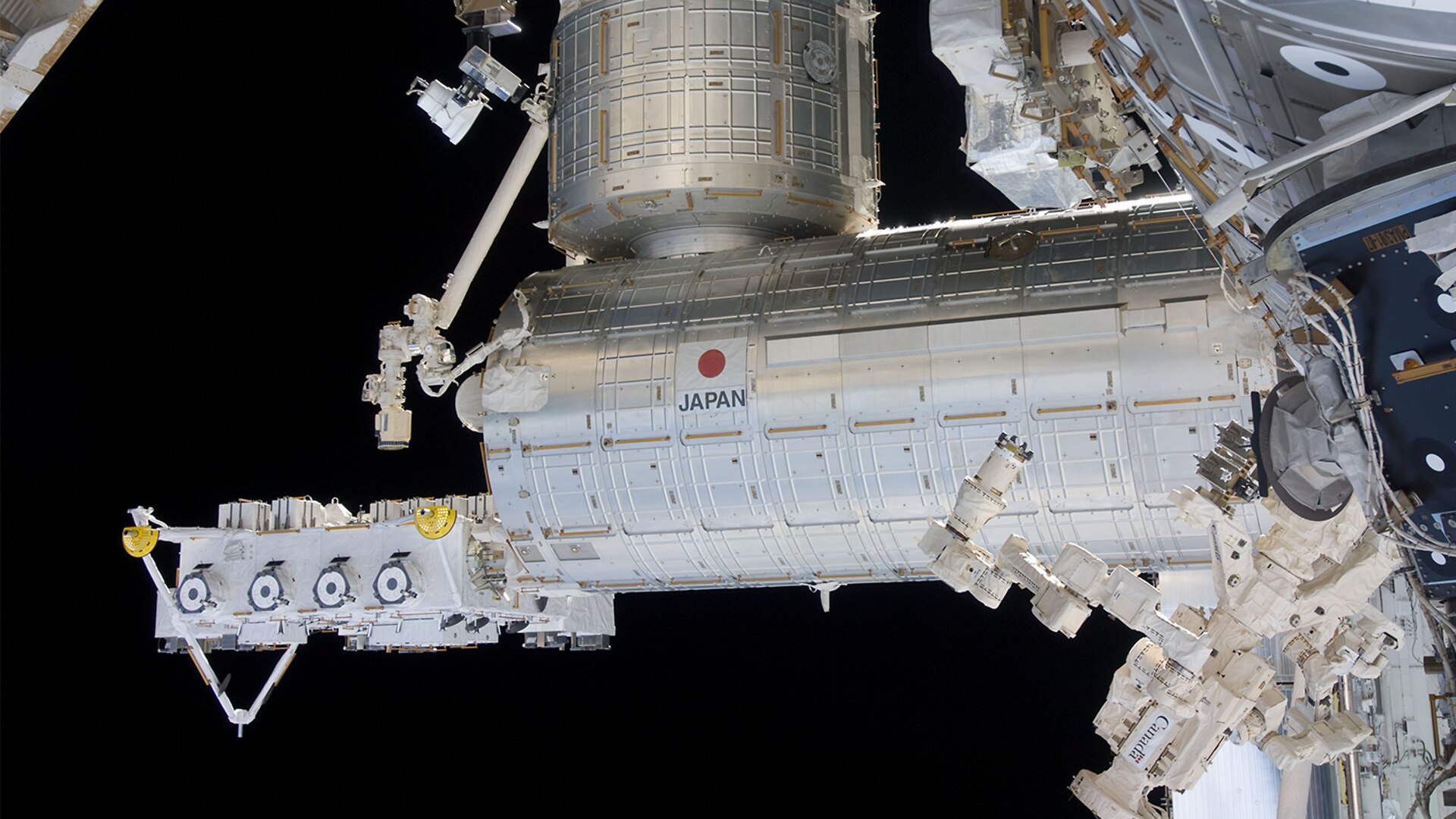
One such experimental robot, called “REX-J” (Robot Experiment on JEM), was used in Kibo, the Japanese module of the ISS, from 2012 to 2013. It was developed by the Japan Aerospace Exploration Agency (JAXA). The objective of the experiment was to develop a new generation of robots (astrobots) capable of moving across the surface of the space station and inside it, to move loads or to perform inspections.
What makes the robot unique is its special locomotion system, which uses tether mechanisms to support the robot. The tethers hook onto the existing gripping bars on the ISS that the astronauts use to secure themselves during essential work on the outside of the station. The mobile robot is equipped with an extendable arm. At the end of the arm, there is a robotic hand that is capable of attaching the tether cables to up to three different anchoring points. This allows the robot to move across a surface like a spider. The robot is operated by the remote control from ground, so that no support from the ISS crew is required.
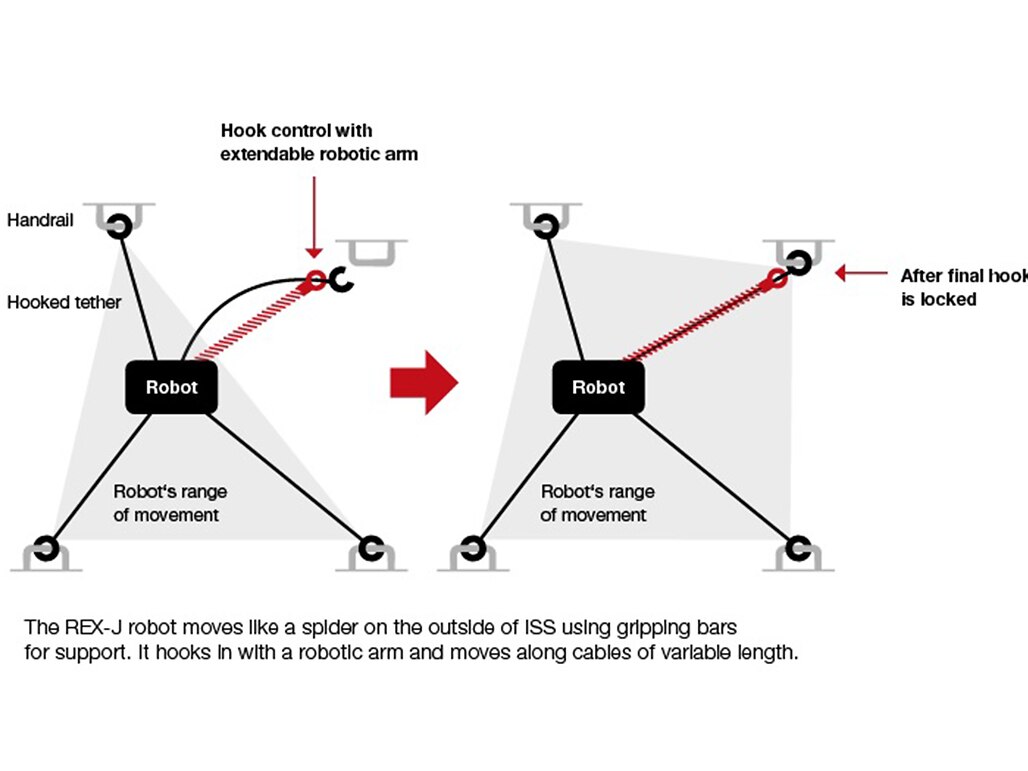
Tethered by its cables, the REX-J moves like a spider on the outside of ISS, using the gripping bars for support. It hooks itself on with its arm and moves along cables of variable length.
Powerful drive systems for precision movements
The REX-J is equipped with several drive systems made by maxon, and so is the extendable robotic arm. The wrist joint has two degrees of freedom: vertical and horizontal. The wrist joint and the arm contain brushless EC-max motors, planetary gearheads, and encoders.
The control electronics for the motors are located in the end of the robotic arm. Additional maxon drive systems are also installed in the rotary mechanism of the robot and in the cable spool (roll-up mechanism).
All experiments with REX-J have been completed successfully. JAXA will now develop the robot system further, with the aim of using such robots for a range of different tasks on the space station in the future. These include monitoring ISS devices and performing visual inspections of the space station, to detect any damage to the outer hull. Another long-term goal is to build mobile astrobots that can manipulate large structures in space.

Brushless EC-max – planetary gearheads and encoders
The wrist joint of the robot contains brushless EC-max motors, planetary gearheads, and encoders. Explore the EC-max products in our e-shop.