maxon Story
機器人系統的功率密度

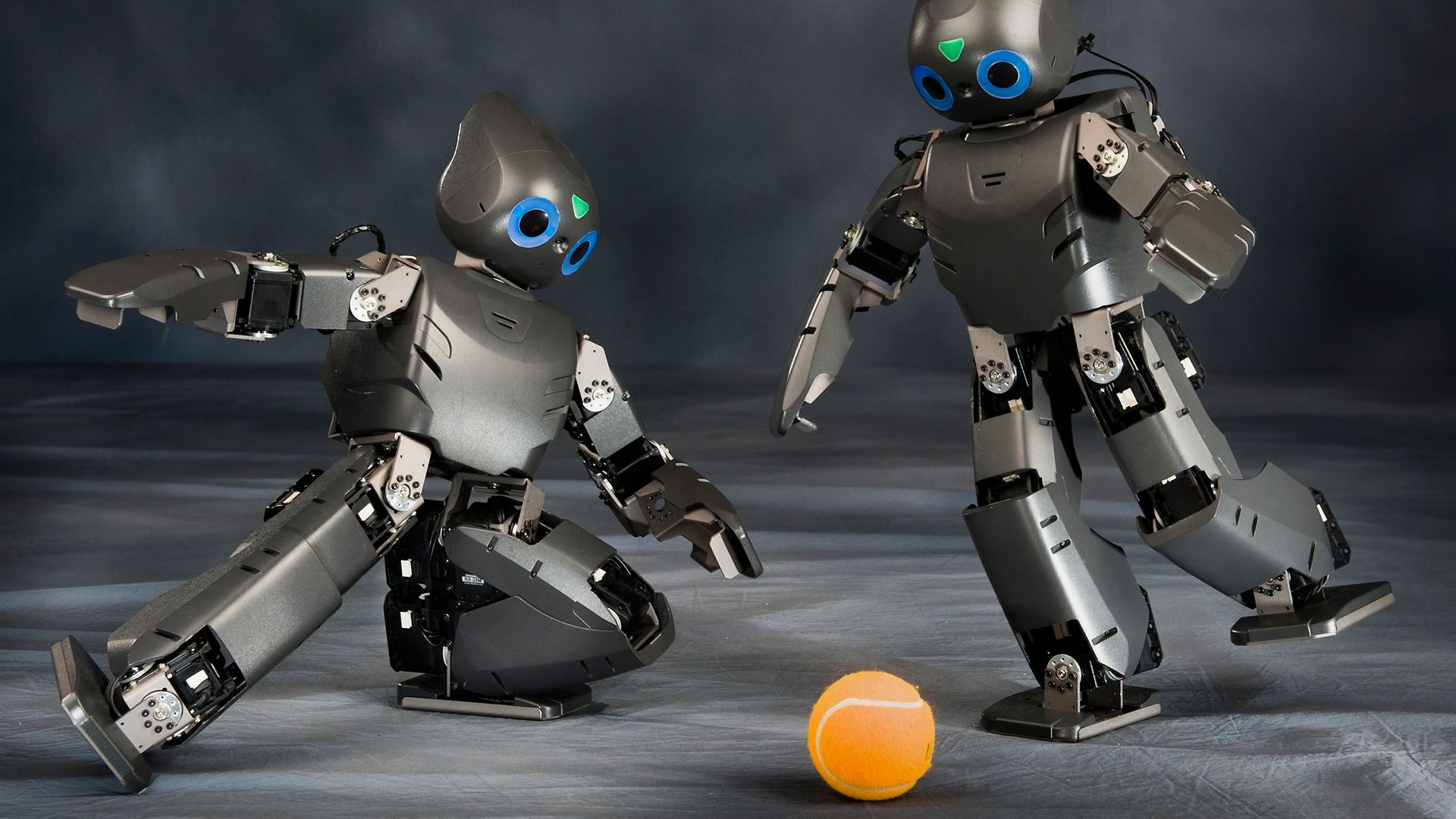
轉矩是關鍵問題,無論是輸送管的檢驗機器人、災區的救援機器人,或是人形機器人,都有一個共同點:它們都是拯救人命的移動式機器人。以下我們將詳細說明這些機器人驅動技術方面的要求。
移動式機器人驅動器的一個基本要求是高功率密度。對於機器人來說,這通常代表了高轉矩,而且必須發生在最小的空間內。在轉速方面,1000 rpm 以下的轉速通常就足以應付機器人應用,甚至是快速運動。
DC 馬達:高功率密度
當需要高功率密度時,DC 馬達通常是優先選擇。DC 馬達可提供高啟動轉矩,因此對於加速應用非常理想。這種 DC 馬達的典型例子是有刷或無刷的「無鐵心」maxon 馬達。它們的效率非常高。這些高轉速馬達的結構通常修長窄小,且轉矩相當低。為了能提供機器人所需的高轉矩,馬達會搭配減速機來使用。
如果需要高作用力的線性運動,則可採用具有高減速比的合適機械設計,不需犠牲高轉速馬達的優點。這樣的例子包括低螺距心軸和採用小型偏轉滑輪的電纜驅動裝置。
多極馬達:轉矩更高
若要提高轉矩,可以增加磁極的數目。maxon EC-4pole 馬達是採用多極馬達的第一步。在這個情況下,額外的磁極也代表了更複雜的設計和組裝。傳統含開槽鐵心的無刷 DC 馬達通常採多極設計,因此高轉矩之下的轉速偏低。

機器人驅動模組:需要小型動力模組 機器人應用中的馬達必須注意三點:高效率、高動態、高功率密度。
EC flat 盤式馬達: 強大且價格誘人
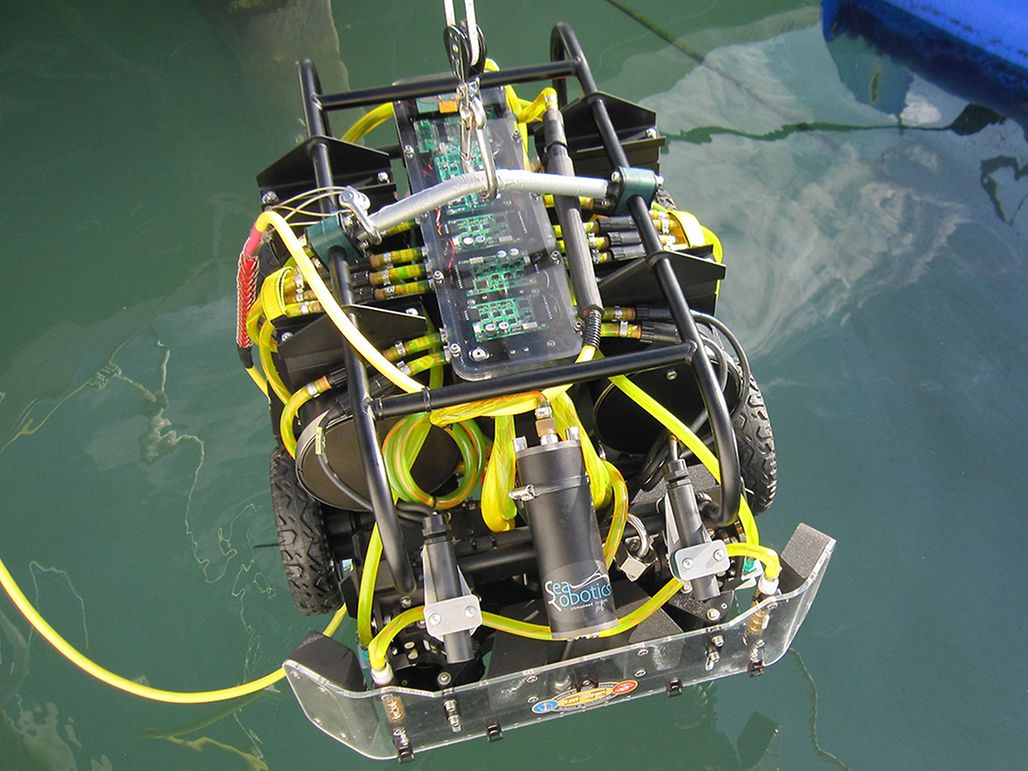
maxon 的多極盤式馬達是最接近滿足機器人理想的產品。這些外轉子馬達可以在距軸旋轉最大可能距離之處產生作用力,進而在中等轉速之下產生相當高的功率密度。然而,轉子的慣性也會偏高,因此限制了動態表現。水下清潔機器人 Hullbug 便是使用盤式馬達的佳例。採用傳統的鐵心多齒線圈和等向性永磁環,以單一步驟實現磁化,使得 EC flat 盤式馬達的製作過程具高經濟效益,並且省去了以單獨零件組裝成磁環的複雜過程。
EC90 flat 的正面和反面。水下清潔機器人 Hullbug 是使用盤式馬達的佳例。


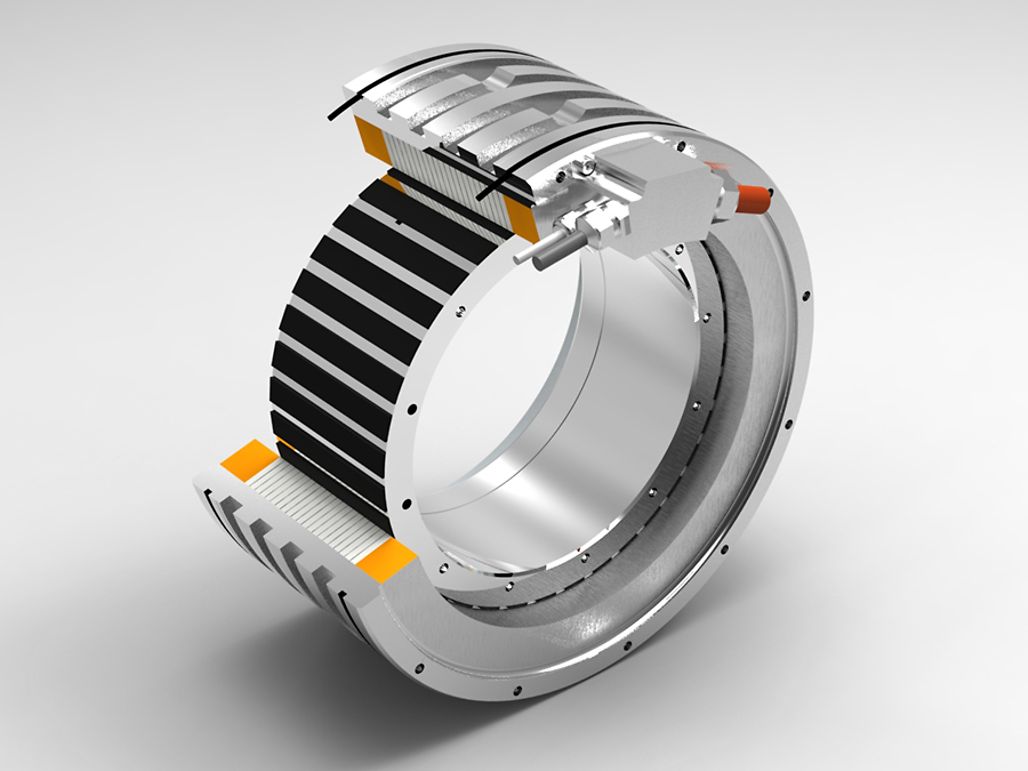
轉矩馬達:高極數但卻昂貴
轉矩馬達是多極數的例子:轉速、高轉矩電動空心軸馬達。通常只由一個轉子和定字組成,並直接設計於應用上。如此一來,便不需要減速機、皮帶、耦合器或軸承。這些直接驅動裝置沒有齒隙,通常用在高度精確控制的動態應用中。線性驅動是一個特殊案例。由於轉矩馬達有多個極,因此切換頻率很高。所產生的熱也必須透過水冷方式排散。
儘管轉矩馬達完滿符合機器人應用中的轉矩和動態需求,但由於缺少標準化和對設計有影響深遠的後果,因此使用成本相當高。所以,靈活的模組化馬達-減速機組合是較適合機器人的解決方案。應根據對於功率、空間和同樣重要的成本等具體要求來選擇馬達類型和設計。
還有任何疑問嗎?與我們專家聯絡。