maxon Story
航太世界:maxon 在地表上方 400 km 繞軌運行

國際太空站(ISS)環繞地球至今已 15 年,並在美國太空總署(NASA)、俄羅斯航太(Roskosmos)、歐洲太空總署(ESA)、加拿大太空總署(CSA)和日本宇宙航空研究開發機構(JAXA)合作下共同運行使用。
自從在 2000 年 11 月啟用之後,已有 295 名太空人曾飛往國際太空站,為其進行擴大作業和執行多種研究項目。自 2001 年以來,已有超過 900 多項來自 63 個國家的實驗項目在此完成。實驗項目中包括研究植物在無重力環境下的生長情形、人類的肌肉和骨骼在太空中為何會衰退,以及無重力環境對於人類的免疫細胞有何影響。因為,如今人們已經認知到,太空人的免疫系統在太空環境中會減弱。瑞士盧森大學 Biotesc 團隊的負責人 Alexandra Deschwanden 更明確指出:「在太空中,人類的免疫系統就好比衰退的老年人。」該團隊在 2015 年 1 月將兩項研究專案隨著 SpaceX 天龍號太空船送上國際太空站。欲在國際太空站上進行實驗,技術設備不可或缺,其中包括例如各種不同的實驗室儀器。機器人在此也扮演了關鍵性的角色,它必須接手太空人的任務,或是在一旁協助太空人。
特殊機器人運動系統實驗
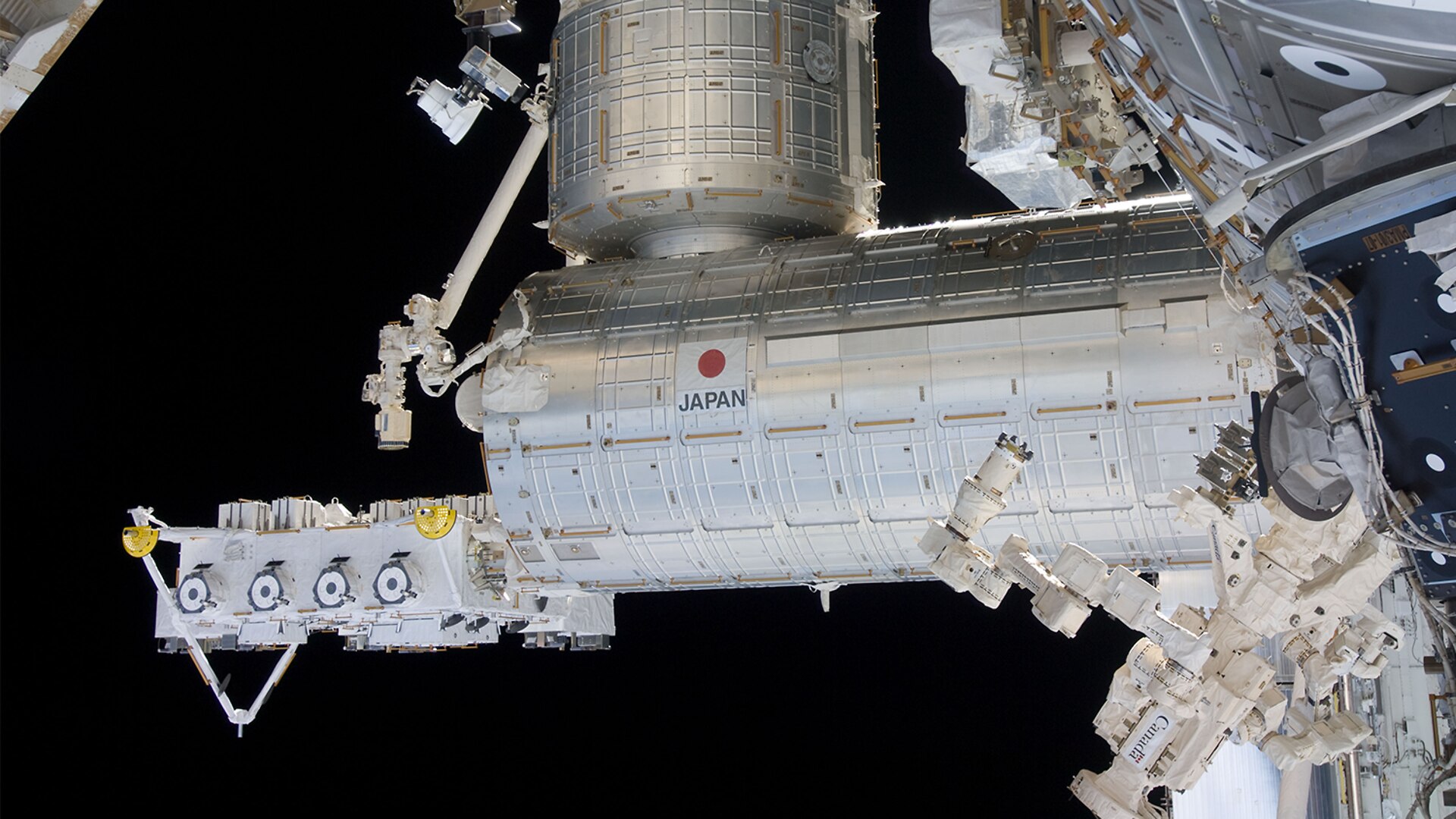
一台名為「REX-J」的日本實驗機器人(JEM)在 2012 至 2013 被應用在國際太空站上的日本 Kibo 模組中。這台機器人由日本宇宙航空研究開發機構(JAXA)研發製成,實驗目標在於開發更新一代能夠沿著國際太空站的外殼和內部移動、搬運重物或執行檢測的太空機器人(Astrobot)。
這個機器人的獨特之處在於它是利用一套電纜支承系統來移動。首先利用鈎子將機器人固定在太空站的扶杆上,這些扶杆原本是太空人在執行外部作業時用來維護安全的。活動式機器人有一隻伸縮臂,其末端裝有一隻機械手,用來將安全纜線固定在最多三個不同的固定點。藉此,機器人便能夠以有如蜘蛛般的爬行方式在表面上前進。機器人由地面站以遙控方式操作,因此不需要國際太空站隊員的協助。
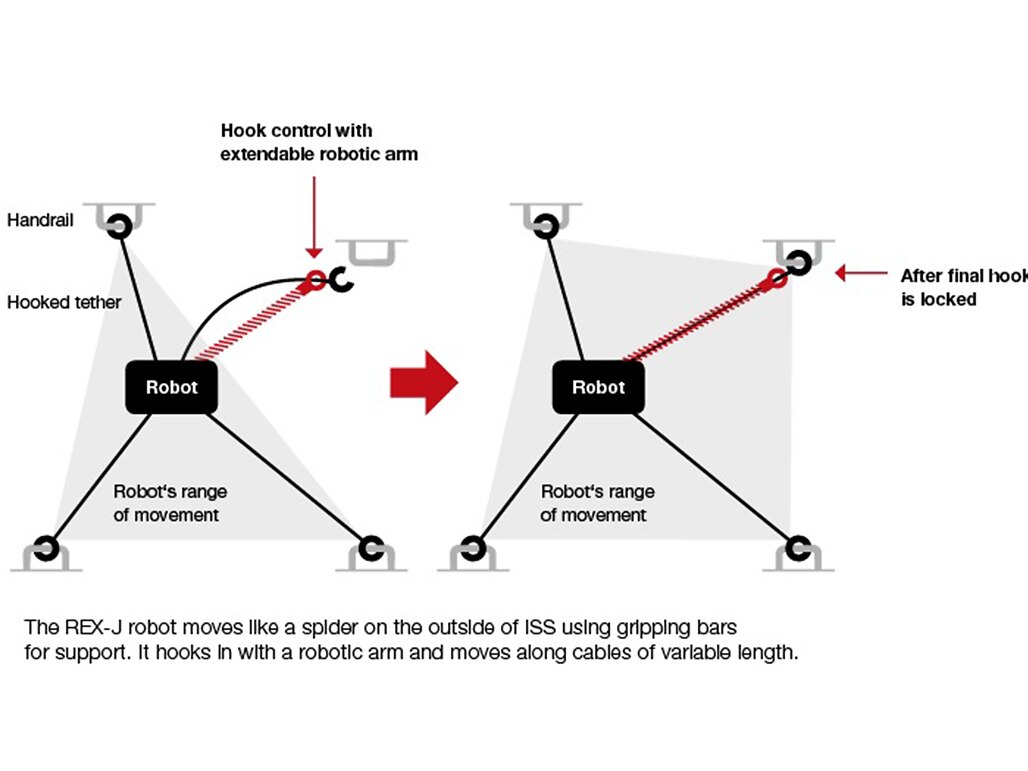
REX-J 利用安全纜線並以扶杆作為固定點,像一隻蜘蛛般地沿著 ISS 的外殼移動。它用一隻機械手臂鈎住固定,然後沿著纜線移動,纜線長度會視情況伸縮調整。
強勁驅動系統實現精準移動動作
REX-J 採用多組 maxon 驅動系統,其中也用於伸縮式機械手臂。手關節可執行兩個自由度動作:垂直和水平。手關節和機械臂中採用了無刷 EC-max 馬達、行星式減速機和編碼器。
馬達的控制電子系統位於機械手臂末端;而在例如機器人旋轉機構和電纜捲筒(捲繞裝置)中,也採用了 maxon 驅動系統。
所有以 REX-J 執行的實驗都相當成功。JAXA 將繼續研發這套機器人系統,使這套系統在未來能被應用在太空站更多不同的任務中。其中包括監控國際太空站的設備,以及為太空站執行外觀檢測,辨識太空站外殼表面的損壞情形。以長期觀點來看,在設計太空機器人的結構時,應該以能夠處理太空中大規模任務為首要考量。

無刷 EC-max——行星式減速機和編碼器
機器人手關節內建無刷 EC-max 馬達、行星式減速機和編碼器。歡迎前往我們的線上商店瞭解 EC-max 系列產品。