Expert Blog
從馬達到驅動系統

maxon 正逐漸從單純的元件供應商發展成為系統解決方案的供應來源。此處所指的元件除了馬達、減速機、編碼器之外,還包括轉速調節器和位置控制器。在系統方面,則是完整的驅動解決方案,包含多個機電單元和子系統,可以整合到更大的應用環境中。所專注的焦點從所使用的獨立元件轉移到應落實的主要功能性。
出發點是一個客製化的元件,更確切來說,是一顆盤式馬達。為了改良散熱效果,轉子採用穿孔設計,並使用特殊纜線和連接器,以便連接至客製化的馬達驅動電子設備。剛開始,工程師們還不知道馬達的確實用途以及有哪些機械和電氣介面。直到來到客戶公司做進一步瞭解時,才知道馬達是要用來驅動一個機器人齒輪關節。空間非常有限,且現有的系統裝置相當複雜,加上客戶要求額外的功能性,因此有充分理由採用一套整合式系統解決方案。
機械方面的要求
· 低轉速和高轉矩需要一組齒輪馬達
· 齒輪輸出的運動範圍:約 120°
· 電源故障時鎖定關節(止動煞車器)
· 可以釋放鎖定。系統可能不會自行鎖定。
· 貫穿關節的纜線
電氣和電子方面的需求
· 無刷馬達的驅動器(包括換向、電流和轉速調節)
· 與上級主控制通訊
· 馬達與減速機輸出角度感應器,將位置資訊發送至主機
所有上述特性均整合在預定義的有限空間與重量中。此外,各種排放(溫度、振幅和可聽聞噪音)都必須維持在低程度。電源由電池供應,系統應以高能效方式運行。另外,當然也必須考慮成本。
這一連串的要求,也展示了在設計一個整合式解決方案時必須充分考慮的方方面面。只有當客戶與系統整合商之間有著密切且開放的溝通時,才能釐清所有這些問題。
系統定界
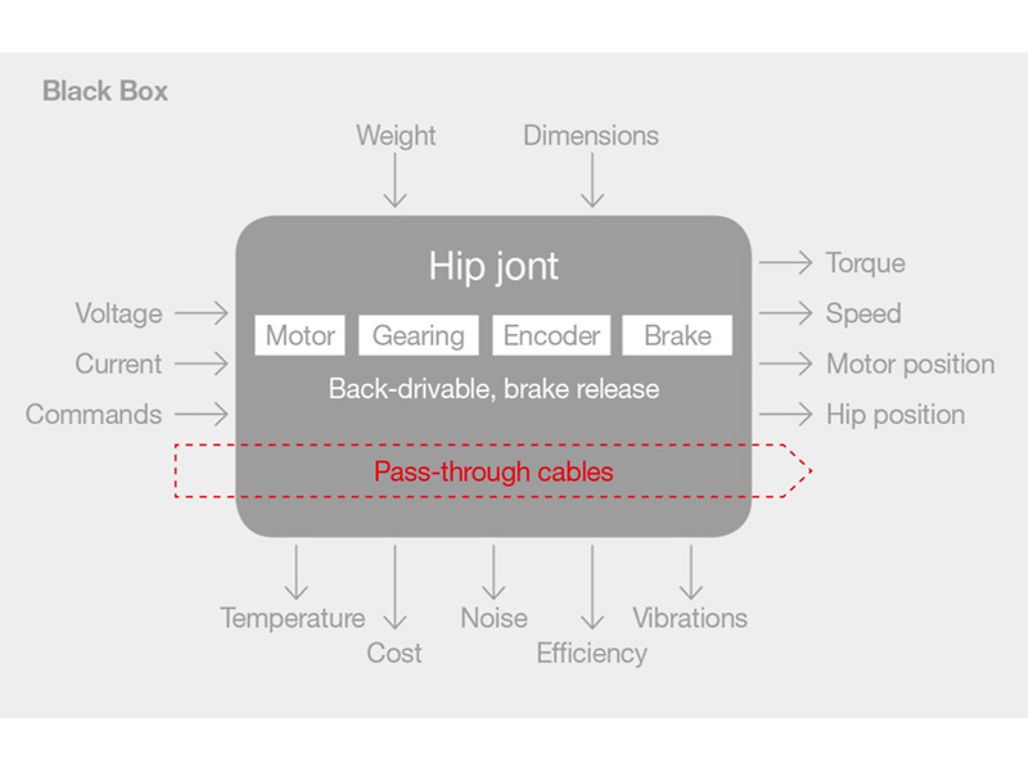
第一個要回答的問題是:系統裡應包含什麼?考慮到應落實的功能,哪裡是合理的系統界限?系統環境、機械和電氣介面會是什麼樣子?如何交換資訊?終端使用者如何與整套系統進行通訊?
在開發整套系統時,有許多來自不同知識背景和持有不同觀點的人員參與其中。要如何建立人與人之間的最佳溝通途徑,以便讓所有人都能獲得共識並為同一個目標努力?上圖中的黑盒子或許可以提供幫助。這種由上而下的方式讓人不會迷失在繁瑣的細節中,是很合理的作法。另一個在處理整套系統時經常被忽略的觀點是:要如何將終端使用者的需求納入考量?
制定系統規格
觸發系統開發的動機裡,可能也包括在制訂應達到的目標時所獲得的建議。這是一項新開發技術?是否旨在改善現有的解決方案?為什麼現有的解決方案無法讓人滿意?在制定規格時,情境分析是最基本的:真正的目的為何?系統全景是什麼樣子?重要的是,必須以中立的態度制定目標,亦即不暗示採用的解決方案。在上述例子中,客戶要求安裝停電時的鎖定功能,其實也可以透過一個自鎖式解速機來實現,不一定只能使用止動煞車器。
解決方案
目標目錄可作為開發不同解決方案的基礎,而每個解決方案都必須判斷其適合程度。可能的解決方案通常可以訴諸於既有的產品。我在此指的是近年來 maxon 產品平臺的設計。在開發系統期間,這個平臺提供了各種既有且技術成熟的元件,且元件都可以快速地客製化調整。這一切都大幅降低了技術、時間和經濟上的風險。
maxon 系統通常出現在結合了機械和電氣元件的機電整合環境,例如:驅動機械機構、執行器、感應器、控制器。軟體也越來越重要,例如控制器韌體或是用來控制整個廠房設備的電腦程式。
牽涉到不同的解決方案時,要確定是在比較相同的東西。好比對於客戶來說,整合系統的成本不僅要與每個元件的成本保持平衡,也要與介面和裝配的成本相稱。
經濟邊界條件
在情境分析中不可或缺的問題是,新設計是否以及何時可獲得回報。在多長的時間內可以預期多少數量?實際的市場預測是必要的。必須確定非經常性的工程設計和工具成本是產品價格的一部分,或是會分開支付。基本上,在經濟方面,淨現值(NPV)計算可以作為是否開始專案的決定因素。然而,其他的標準還包括策略性的合適性考量和風檢分析。
總而言之,除了上述觀點以外,也請遵循教科書「高精度微型驅動模組的選型」中所說明的步驟和流程。
除此之外
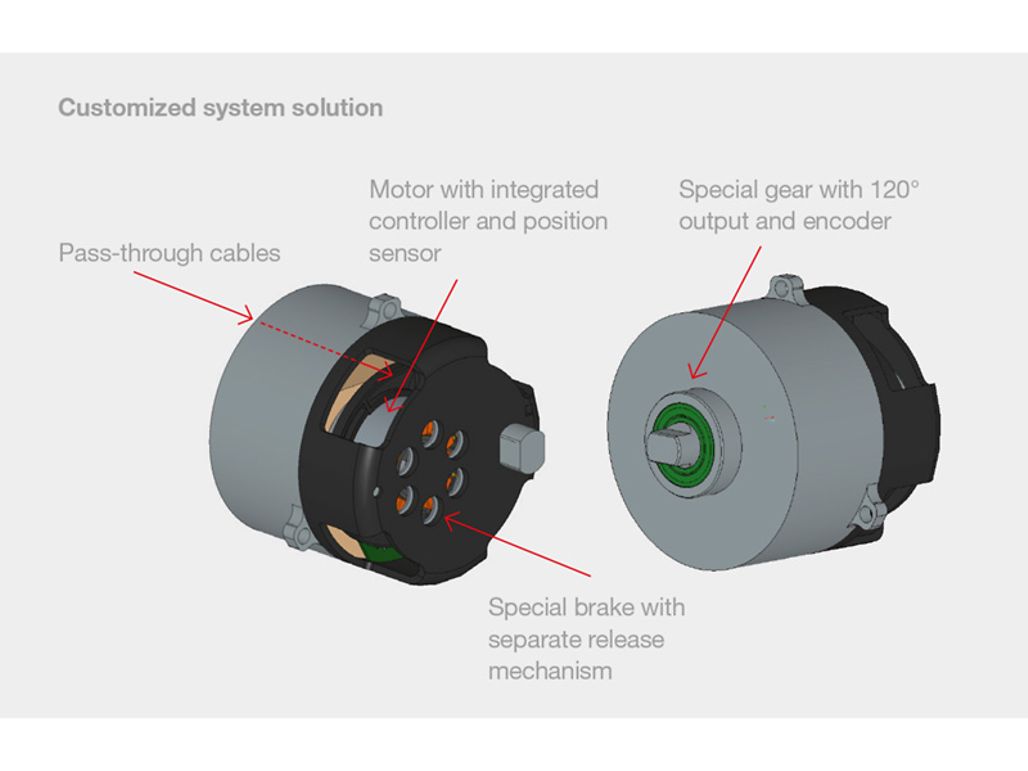
所建議的機器人髖關節解決方案包含了最初選擇的馬達,但配備以 maxon ESCON 控制器平臺為基礎的積體電路,並結合了一具特殊的減速機。馬達和減速機位置由內建的編碼器發送。專門為此設計的止動煞車器位於小型外殼內,直接對機器人發生作用。對於客戶而言,相較於以單一元件組成的現有解決方案,這套整合式系統的安裝方式簡單快速多了。