maxon Inside
如何選擇編碼器 – 第三部分:轉速調節

一篇全面深入的分析顯示,要實現高度精準的轉速調節,需要最高的編碼器解析度。編碼器的解析度隨著所需轉速精度的平方提高。此外,還需要快速的轉速控制迴路,而高慣性質量也對轉速穩定性有正面的影響。
- 務必牢記:編碼器的解析度並非是唯一會影響轉速調節精確度和靈活度的因素。必須考慮到整體系統的反應。反應時間可能會受到各種因素的約束,例如電源和控制器的電流和電壓限制、控制迴路的抽樣率、慣性質量、摩擦變量和機械間隙。
增量式編碼器如何估算轉速?
轉速是透過控制器計算指定時間間隔之內的狀態變化次數所估算得出。例如,EPOS2 的轉速調節抽樣率為 1 kHz。因此,內部轉速是由每毫秒的 quadcount 數量(qc/ms)之整數來測量,相當於 500 cpt 編碼器上 30 rpm 的轉速解析度(每轉 2000 qc)。編碼器解析度愈低,該轉速量化就越大。
必須強調的是,由於以數位方式採集,因此是度量衡方面的問題。您所測量的並非系統行為。實際的馬達轉速會採用設定值,並且由於機械慣性(飛輪效應)而保持不變。只是測量值會在平均轉速附近波動。
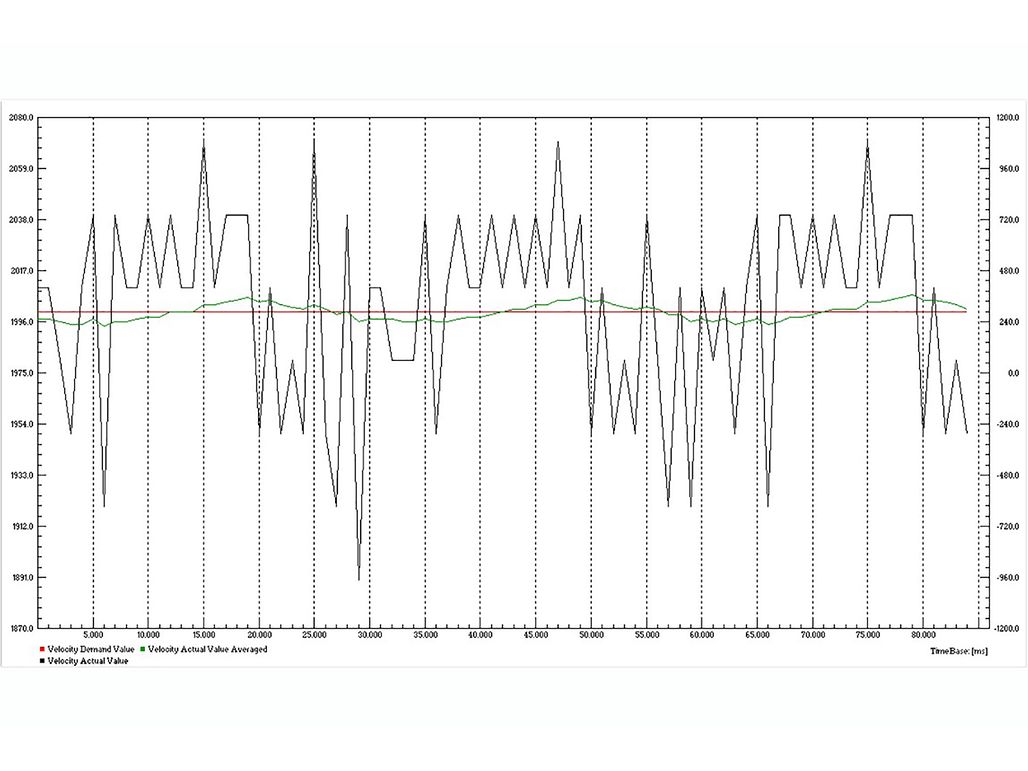
一顆搭載 maxon MR 編碼器的馬達上所記錄的速度信號。(畫面截自 EPOS2 Studio 數據記錄儀。)黑線為感應器所讀取的轉速。每一步以 30 rpm 跳進,相當於解析度 1qc/ms。此外,信號也顯示了 30 ms 的週期,也就是馬達每轉 1 圈所需的時間。綠線為平均速度,更清楚顯示了此週期性。此平均轉速信號更接近馬達實際轉速。但是在這種情況下,反而反應了編碼器的缺陷。順道一提,當轉速為 2000 rpm 時,平均信號的轉速精確度誤差約為 3 rpm——這是相當好的表現!
高速之下的轉速調節
編碼器的電子元件會限制可處理的最大脈衝頻率,因此也限制了編碼器的最大轉速。在某些情況下,這種限制來自機械結構上的考量,例如不平衡和安裝公差。
此外,也應考慮到控制器上的編碼器輸出的頻率限制。如果需要非常高的轉速,便應選擇相對低的編碼器解析度。
在轉速高達每分鐘數千轉的情況下,百分之幾的相對轉速變化就相當於每分鐘幾十轉的絕對精度,很容易達成。
規則 #4:高轉速調節編碼器(> 500 rpm)
應選擇具有中等或較少狀態變化和最大額定轉速夠高的編碼器。在許多情況下,maxon EASY 編碼器會是完美的解決方案,不需要用到高精度光學編碼器。經驗法則:(轉速 rpm)x(編碼器解析度 cpt)> 100,000 rpm cpt 足以應付大多數的應用。
低速時的轉速調節
在高速情況下,狀態計數型的轉速估計可獲得良好的轉速調節性能,但在低速時就變得相當困難。假設轉速為 60 rpm,也就是必須每秒轉 1 圈才能保持 5% 或 3rpm 的精度。以同上的 500 cpt 編碼器和 1ms 控制循環時間來看,您將永遠無法得到穩定且平穩的受控轉速。
為了降低絕對轉速波動,您需要更高的編碼器解析度和更快的控制器。想像一下 5000 cpt 的編碼器用在上述情況中;您將獲得多出 10 倍的反饋。然而,在低轉速的情況下,控制迴路應能夠更快地做出反應,將絕對轉速偏差減至最小程度。這兩項需求都提高了對編碼器的要求。編碼器的解析度隨著絕對穩定性的平方提高:容許的轉速變化的一半需要高出 4 倍的編碼器解析度。
當轉速非常低時,有些控制器會採用替代方式來評估轉速。此時會測量兩個狀態之間所經歷的時間。轉速回饋值將更均勻,從而實現更嚴格和更動態的調節功能。
EPOS4 控制器允許在低轉速之下使用其他方式,被稱為轉速觀測器。轉速觀測器是控制迴路中的元件,分兩個步驟來計算所觀測到的轉速。首先,以用來定義系統機械轉換功能的參數來預測轉速、位置和外部轉矩。第二,根據新測得的轉子位置來修正預測的數值。
然而,高解析度編碼器和快速控制器仍佔有優勢。
規則 #5:低轉速調節編碼器(< 100 rpm)
應選擇狀態數量高或非常高的編碼器結合快速控制器。