Expert Blog
雙迴路控制:不再有齒隙
在有機械齒隙和彈性組件的情況下,還是可以精準動態定位負載且不會產生振盪嗎?可以的——只要使用智慧化系統。
電動驅動系統在移動負載時,通常會以馬達軸上的編碼器來提供用於控制的位置和速度資訊。在動態位置控制過程中,高編碼器解析度和精確偵測馬達軸反應是關鍵因素。然而,從應用的角度來看,輸出側負載運動的精準度最終才是對產品的品質和尺寸精確度有決定性影響的一點。減速機、主軸和驅動皮帶都可能在這方面產生負面影響。視運動方向而定,減速機的齒隙可能導致在輸出側形成不同的負載位置。彈性則可能會在運動起始或停止時引發延遲或振盪。能想到的第一個解決方式是在輸出軸上安裝編碼器,而不是在馬達軸上。然而,這個方法並不成功,反而削減了系統性能。
在有齒隙或彈性的機構中,必須使用基於兩個編碼器來控制的系統,以實現靈活和精確的負載定位:
- 一個旋轉編碼器——即輔助編碼器——固定連接在馬達軸上。此編碼器必須已經是馬達組合的一部分。
- 另一個編碼器則為主編碼器,連接至輸出側上的活動負載。
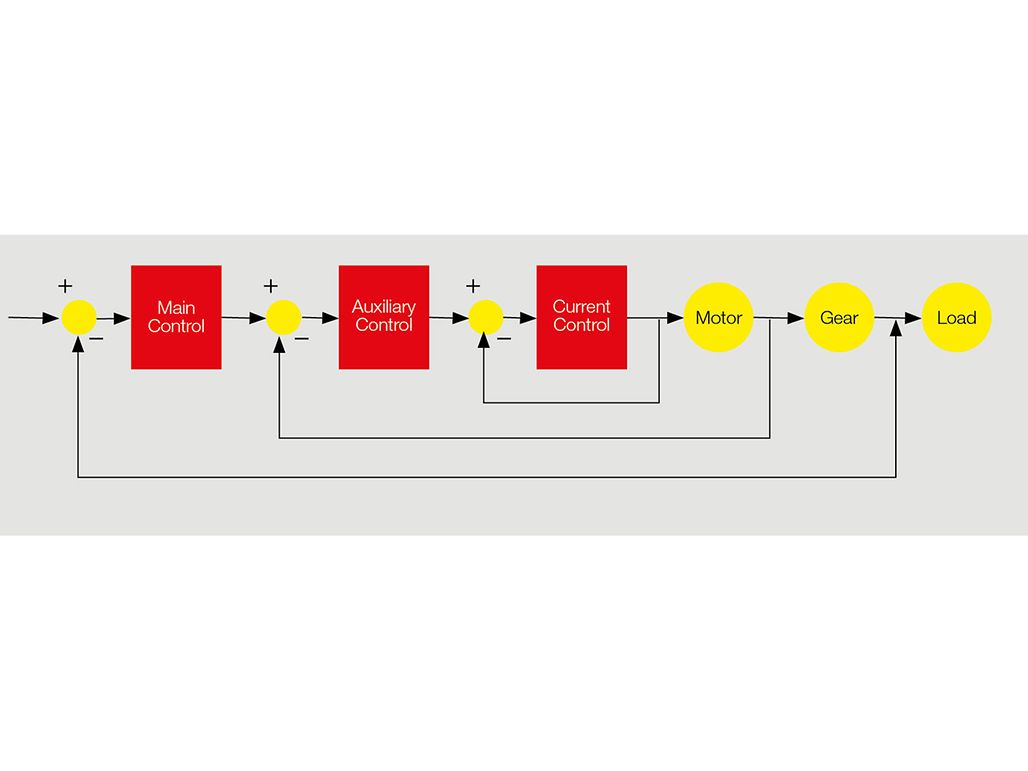
圖 1 雙迴路架構包含三個內建反饋迴路。
為了能處理來自這兩個編碼器系統的信號,須使用雙迴路控制。maxon 的 EPOS4 位置控制器可借助一個二級濾波器和增益排程器來擴充此雙迴路控制,以抵消機械共振和齒隙。EPOS Studio 試運轉軟體提供一個控制調諧工具,能夠自動定義複雜控制結構的參數。此外,軟體還能夠標繪驅動模組的傳遞函數。
控制架構
EPOS4 使用級聯控制結構來控制雙迴路(見圖 1):
- 最內部的控制迴路根據所收到的馬達電流量測反饋信號來提供馬達電流的場導向控制(= FOC)。
- 中間的控制迴路(輔助控制)基於馬達軸上的編碼器來控制馬達轉速。
- 最外側的控制迴路(主控制)基於負載上的編碼器系統來控制負載的位置。
EPOS4 雙迴路控制結構詳細示圖請見圖 2。
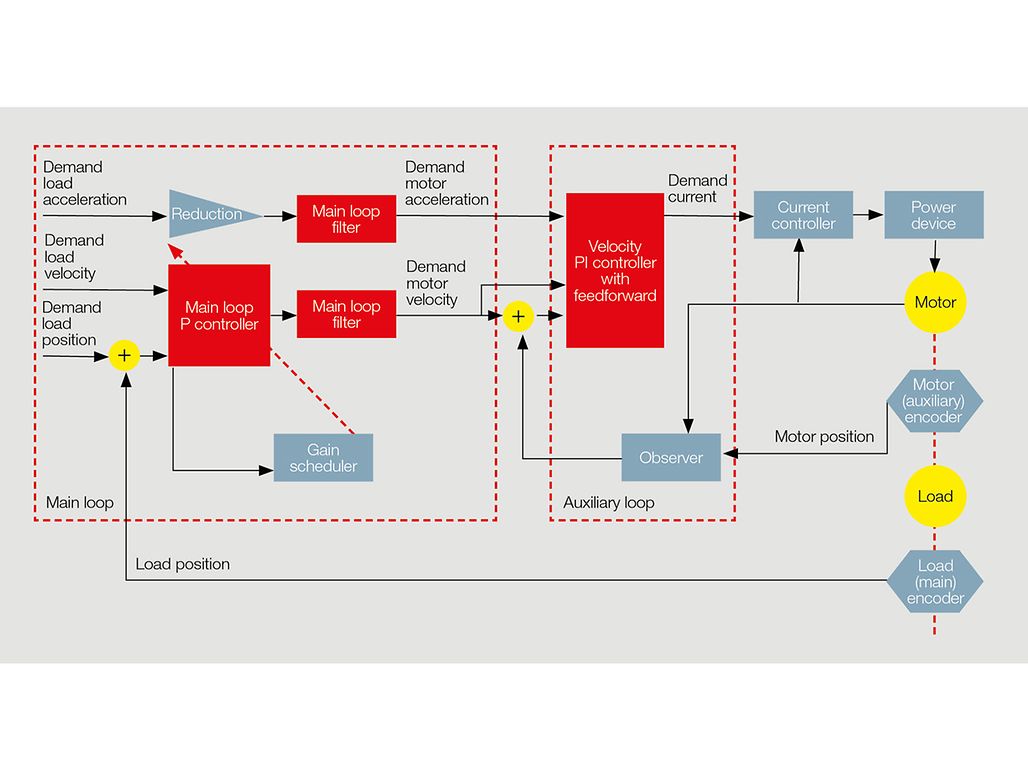
圖 2 雙迴路控制系統內所有元件的詳細示圖。
主控制迴路
主控制迴路包含一個比例控制器(P)、一個增益排程器、一個二級濾波器(主迴路濾波器)。一個路徑規劃器提供所需負載位置和其需要的速度和加速度,以作為主控制迴路的輸入變量。另一個輸入變量則是負載的當下位置,由該負載上的編碼器測量得出。
- 增益排程器
EPOS4 雙迴路控制必須使用增益排程器來消除齒隙的負面作用。增益排程器透過自動調整主控制迴路的比例增益來消除此作用。若追蹤誤差(當下負載位置與所需位置之間的偏差)太大,會採用較高的比例增益,如此可快速降低錯誤機率。隨著追蹤誤差變小,也會降低比例增益,如此一來,即使在有齒輪齒隙的情況下,驅動模組中也不會產生振盪。
- 主迴路濾波器
如果馬達和負載之間出於耦合、皮帶或是長主軸的關係而有一定的彈性,共振頻率可能會引起放大振盪。這些振盪可能會不斷增強,以致於控制變得不穩定。為了避免此情形,EPOS4 雙迴路控制使用一個二級陷波濾波器。此濾波器會抑制來自主控制迴路的輸出信號中的振盪頻率範圍,借此避免驅動系統中出現諧波振盪。
輔助控制迴路
輔助控制迴路包含一個有前授功能(FF)的比例積分控制器(PI),和一個利用來自馬達編碼器的位置資料與馬達電流測量資料來估計馬達轉速的觀測器。
自動調諧程序
為了簡化試運轉過程,maxon 的 EPOS Studio 軟體裡內建自動調諧精靈,可定義並驗證雙迴路控制器的參數。自動調諧程序包含兩個自動執行的實驗。
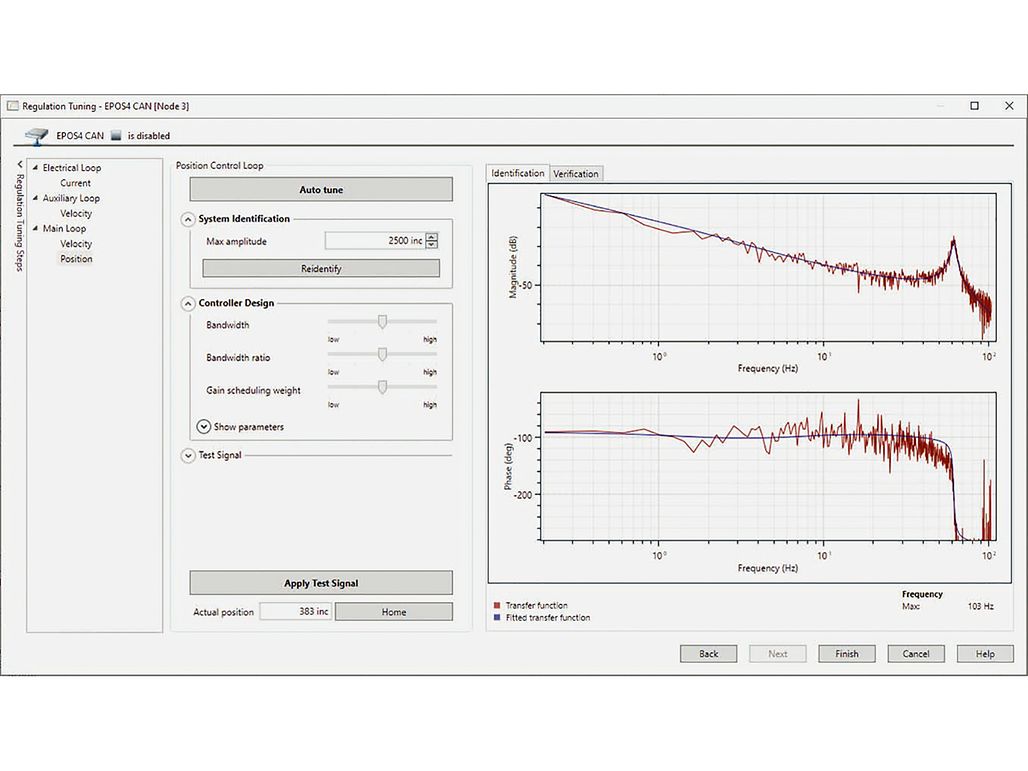
圖 3 EPOS4 識別傳遞函數範例,含共振。
- 實驗 1 觸發馬達軸的振盪。這些振盪被用來定義馬達內的慣性質量、轉矩常數和摩擦。然後會利用識別出的資料來計算輔助迴路控制器和觀測器的參數。
- 實驗 2 用來計算主控制迴路和陷波濾波器的參數。利用一個 PRBS(擬隨機二進序列)信號來激發設備。基於所獲得的輸入/輸出資料識別出傳遞函數,並將以波德圖顯示(請見圖 3)。
波德圖無法匯出。此圖旨在協助技術人員,在改良機械設計和為特定應用手動調整控制時可用於分析系統。
單迴路控制和雙迴路控制的比較
以下圖表顯示有齒隙的系統(圖 4)和有彈性耦合的系統(圖 5)各自的參考回應與追蹤誤差之間的區別。圖片中比較了負載上有編碼器的單迴路控制以及馬達軸和負載上都有自動調諧雙迴路控制。
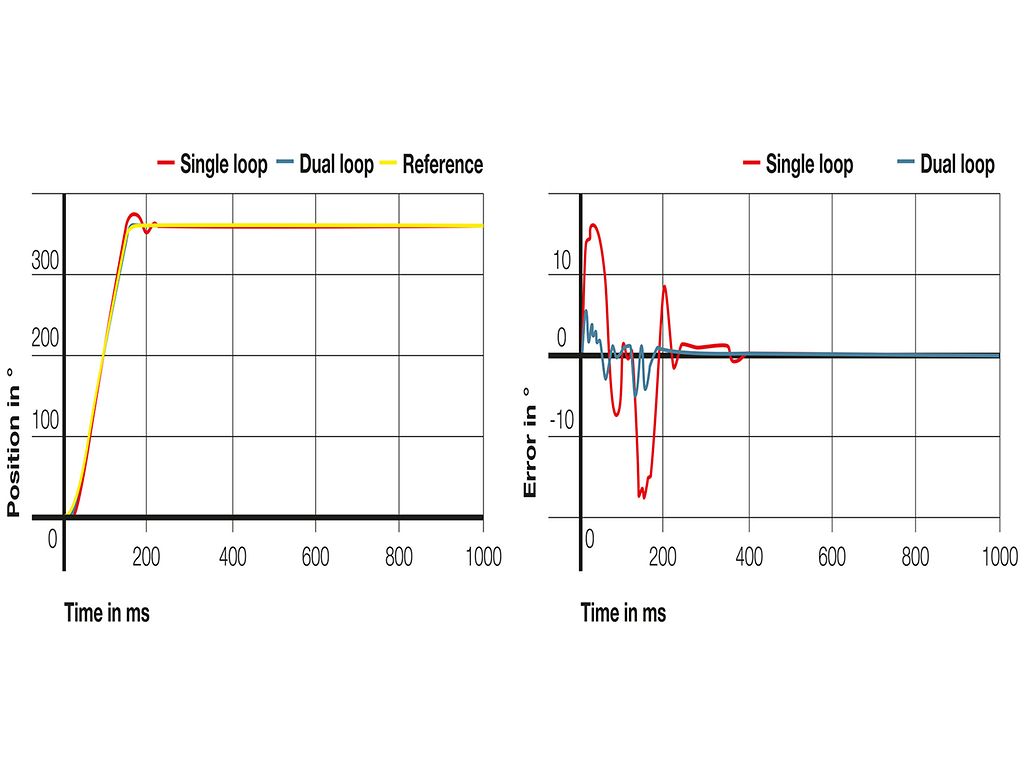
圖 4 有齒隙的系統的負載位置曲線圖:參考回應(上)和追蹤誤差(下)。
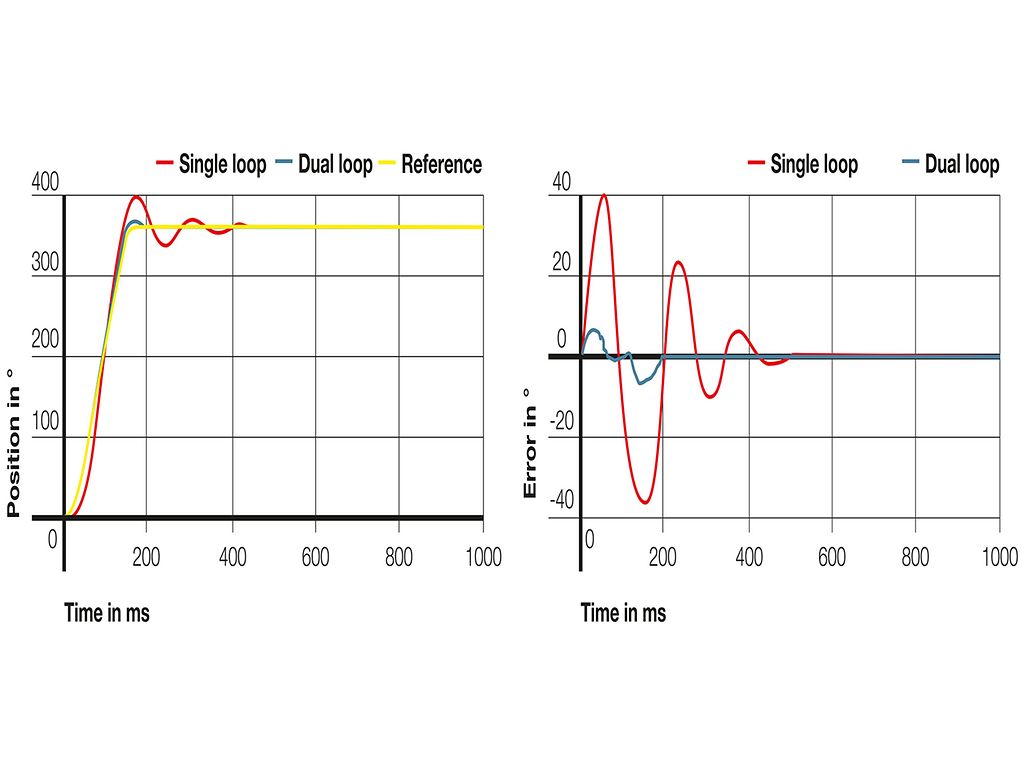
圖 5 有彈性的系統的負載位置曲線圖。參考回應(上)和追縱誤差(下)。
雙迴路控制是可讓驅動系統更精準和更高效的一種方式。maxon 不僅可提供所有必要的組件,還擁有非常多的諮詢經驗——從初期想法到系統設計,再到全尺寸商業製造。