Young Engineers Program
為飛行機器人開路

作為蘇黎世聯邦理工學院重點計劃的一部分,八名大學生建造了一架飛行機械夾爪,可以在空中任何方向停留並抓取物件。這架無人機甚至比四軸飛行器更機動,設計目的在於將空中機器人技術推向更新境界。
倉庫裡的飛行機器人運送著包裹。為了嘗試讓這個未來內部物流的願景成真,已經有許多投資人採用四軸飛行器配備序列夾爪臂的方式。然而,這種無人機加機械臂的組合速度緩慢,而且伸出的機械臂會使重量分配不良,導致精確度和負載能力降低。此外,四軸飛行器只能在水平面上旋轉,這也表示所謂的末端執行器——本案例中為夾爪——無法朝所有方向運動。目前為止,無人機大多仍僅限用於偵察任務。
去年秋天,蘇黎世聯邦理工學院的機械工程系與程序工程的一組學生有了開發一種沒有這些缺點的整合式飛行機器的想法。這些年輕的工程師獲得了自主式系統實驗室(Autonomous Systems Lab (ASL))重點計劃的標案,並建造了一台全向飛行機械夾爪,也就是能夠與其環境進行實體互動的裝置。

3D 列印機的啟示
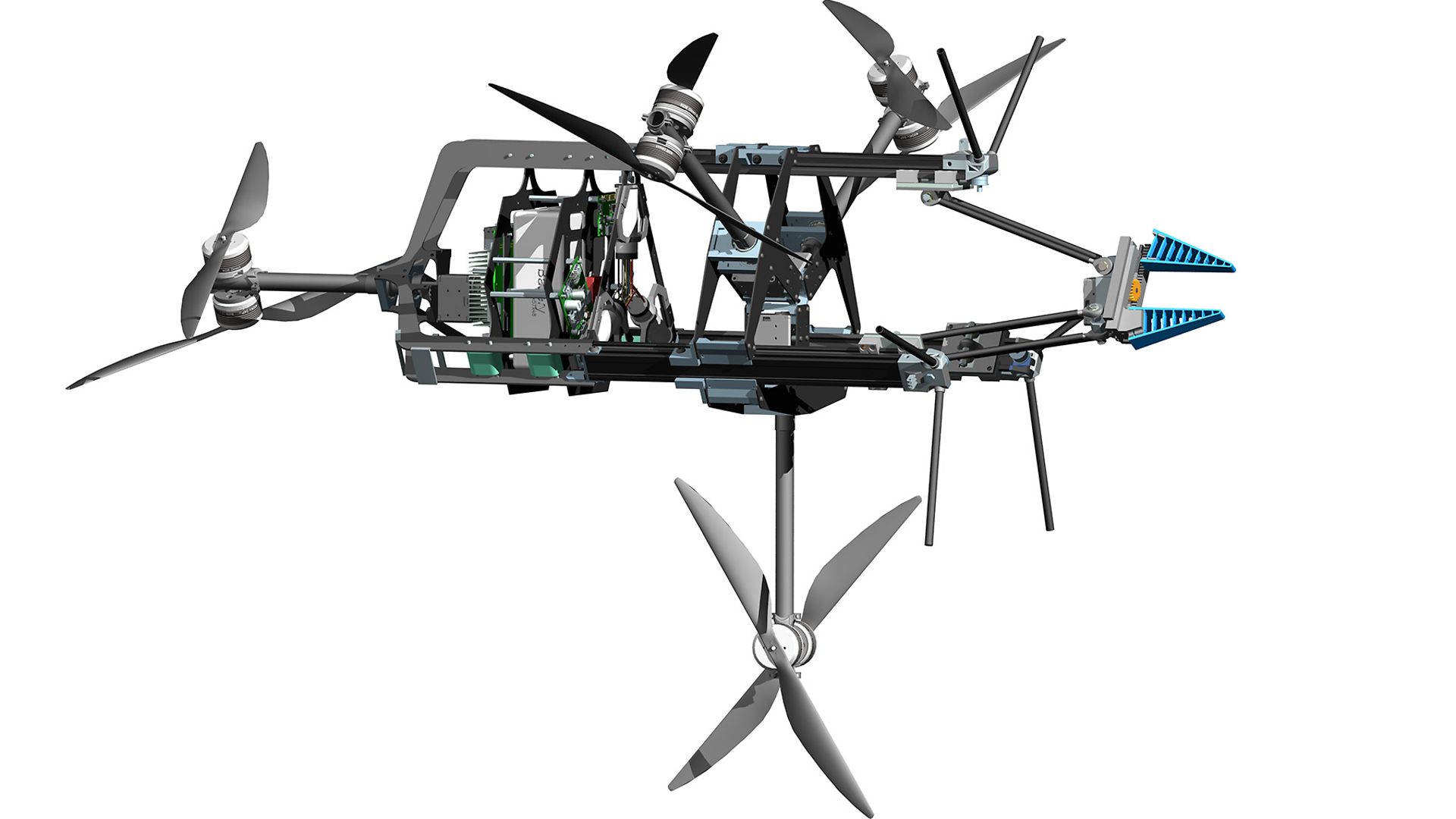
為了打造一個高精度末端執行器,這些學生們用三個滑塊將一根線性並聯機械臂安裝在一個稜柱結構上,而這三個滑塊可以前後滑動。年輕的發明家在 Prismav(Prism Micro Aerial Vehicle 的簡寫,意為稜形空中微型載具)的四個不同方向上安裝驅動模組,每一個都配備兩組反向旋轉的螺旋槳。如此可以平衡每個螺旋槳的力矩,維持飛行平穩。
三角臂的靈感是來自於 3D 列印機的內部結構。機械工程學生 Matthias Rubio 解釋道:「我們站在 3D 列印機前,想到利用列印機的內部結構來建造一個結合飛行和夾爪機構的飛行平臺。」這是一條新途徑,因為這種三角臂在飛行抓夾器領域中仍很少見。
並聯機械臂可補償定位錯誤
轉子組可以繞著自己的軸旋轉。這使得 7.5 kg 的飛行器可以朝任何方向在空中停留。在這個重點計劃中,全向無人機是在一個配備有視覺運動追蹤系統的空間內運行,以便能精確測量位置和對準。這使得 Prismav 能夠與其四周環境互動,並將夾爪精確定位。兩組容量 20,000 mAh 的電池可提供約 12 分鐘的飛行時間。

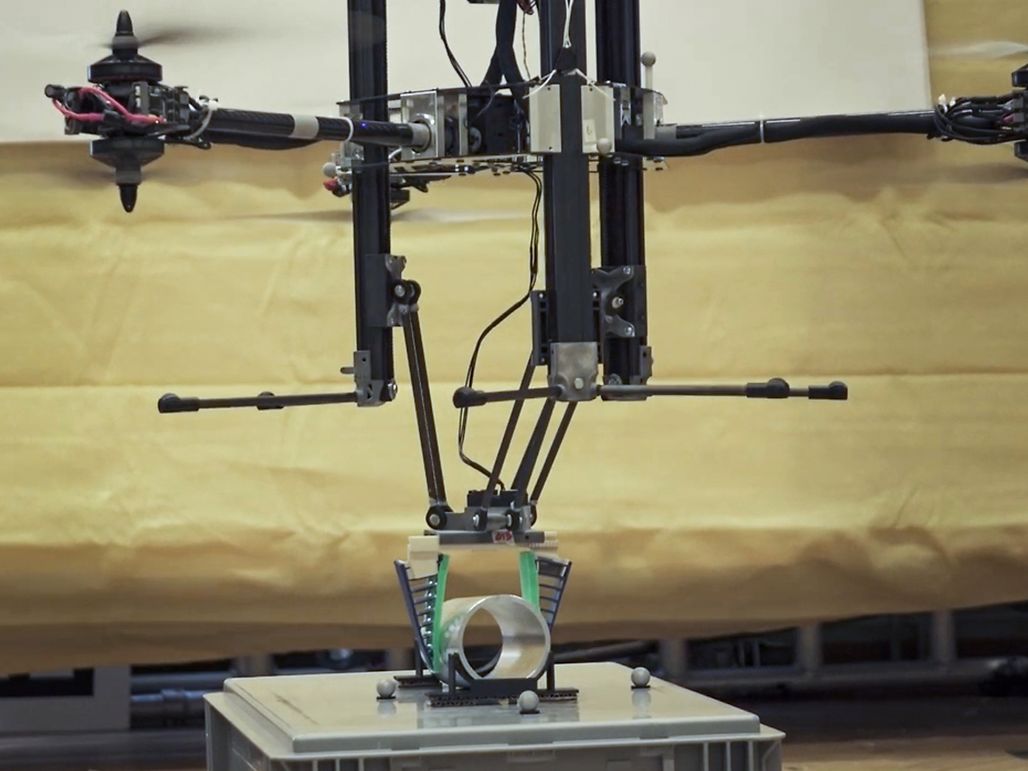
Griffin 團隊的 8 名學生(七名來自機械工程學系,一名來自電機工程學系)在一次成功運送 500 g 圓柱體的飛行之後開心歡呼。
飛行中仍有的不精確度通常在 10~15 公分範圍內。為了補償這一點,由三顆無刷 maxon 馬達負責精確定位夾爪臂。三個在線性導軌上滑動的滑塊都分別利用齒形皮帶來固定。在這樣一個系統中,夾爪可以達到標記 3D 空間內的任何位置。為了不因減輕重量而在施力方面有所妥協,團隊選擇了結構精巧的 ECX TORQUE 22 M 驅動模組。
危險或難以到達的區域
藉著 Prismav,學生們為進一步的研究奠定了基礎。Matthias Rubio 補充道:「我們展示了飛行夾爪可以和周遭環境互動,抓取、運送和放下 500 g 重的圓錐體。」關鍵在於,夾爪臂補償定位錯誤的速度比無人機的動作更快。
這個重點計劃在 2021 年推出,獲得了熱烈反應。因此,學生們現在繼續開發 Prismav,作為他們的學士專案的一部分。他們不斷改良自動定位功能、飛行路徑計算和控制軟體,並且整合一個直覺控制器。這一點是很合理的,因為潛在的應用範圍非常大。例如,飛行機器人未來可以在難以到達或是危險的地點執行工作:鎖緊螺絲、搭設鷹架、修理高壓電纜,或是甚至建造雪崩防護結構。