Expert Blog
Seleção do codificador — parte um: propriedades

Como escolher o codificador certo para a sua aplicação? Este blogue apresenta algumas respostas.
O sensor de feedback de eleição para muitas aplicações com motores pequenos é o codificador incremental digital. Esta série de publicações no blogue começa com uma reconsideração mais detalhada das propriedades mais importantes dos codificadores antes de analisar a seleção para aplicações de controlo da posição e da velocidade.
Quais são os requisitos habituais?
Cada aplicação é distinta. A tarefa principal pode ser o controlo da posição ou o controlo da velocidade. O nível de precisão no controlo da posição ou da velocidade pode ser muito diferente e deve ser definido antes de selecionar o codificador. Um controlo da velocidade a velocidades baixas (inferior a 100 rpm) requer um melhor feedback do que o controlo da velocidade a altas velocidades (1000 rpm e superiores).
A carga pode ser diretamente acoplada ao motor ou existe um sistema de transformação mecânico, tal como um redutor, um parafuso ou outro. Os codificadores são habitualmente montados no veio do motor, mas também podem estar sobre a própria carga. As propriedades mecânicas do mecanismo de transformação influenciam a seleção do codificador: a relação de transmissão da engrenagem e o desempenho mecânico têm de ser considerados.
As condições ambiente, tais como a temperatura, vibração, interferência eletromagnética, também influenciam a seleção do codificador. Os codificadores óticos, por exemplo, devem ser protegidos contra o pó. Os codificadores magnéticos podem ser sensíveis a campos magnéticos externos — incluindo os campos do motor — e podem necessitar de uma blindagem.
Quais são as principais propriedades dos codificadores incrementais?
O parâmetro característico de um codificador incremental é o número de impulsos retangulares por revolução do motor. Habitualmente, existem dois canais que fornecem o mesmo número de impulsos. Os dois sinais têm um deslocamento de fase relativo de um quarto do comprimento de um impulso. Esta disposição permite a deteção da direção da rotação do motor e permite 4 estados distintos por impulso. Por vezes, estes estados são designados por quadcounts. Estes representam a resolução real que é 4 vezes superior ao número de impulsos num canal. Um codificador com 1000 ipv (contagens ou impulsos por volta) permite 4000 estados por volta ou uma resolução nominal de 360°/4000 = 0,09°.
Atenção: ao discutir a resolução de um codificador, certifique-se de que todos falam do mesmo: o número de impulsos por canal (ipv) ou o número de estados (os quadcounts).
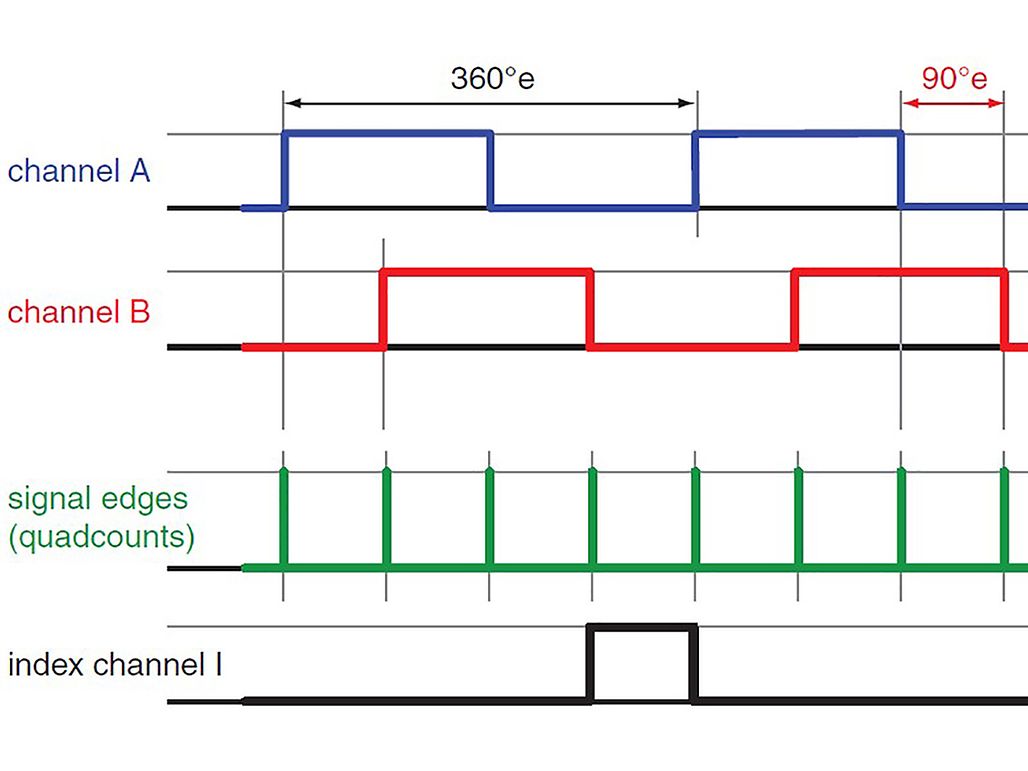
Sinais de um codificador incremental digital. A contagem das alterações de estado (os flancos de sinais dos canais A e B) resultam numa resolução 4 vezes superior ao número de contagens por volta num canal de codificador.
A resolução do codificador pode variar consideravelmente. Desde um codificador simples de 1 ipv (ou 4 estados) que apenas pode ser utilizado para detetar movimento a um codificador de vários 10 000 ipv para um feedback de posição e velocidade altamente preciso. Existem vários fatores que influenciam a resolução alcançável do codificador: o princípio físico base (ótico, magnético, indutivo...), o tipo de sinal primário (analógico ou digital), o tratamento de sinal (p. ex., interpolação) e o layout mecânico, citando apenas alguns. No entanto, este blogue não é sobre o design do codificador, mas sim sobre como os requisitos de controlo de uma determinada aplicação podem ser cumpridos por codificadores adequados.
Qual o nível de precisão dos codificadores?
A resolução — o número de estados — fornece a precisão nominal; a posição é conhecida dentro de um erro de 1 estado. No entanto, os comprimentos de impulsos do codificador podem variar devido a tolerâncias mecânicas (por ex., desalinhamento do veio, comprimento dos polos magnéticos e outros). Os impulsos de uma gama de rotação do motor podem ser mais curtos do que os impulsos de outras gamas. Como resultado, a posição medida desvia-se da posição real de forma periódica ao longo de uma revolução do motor.
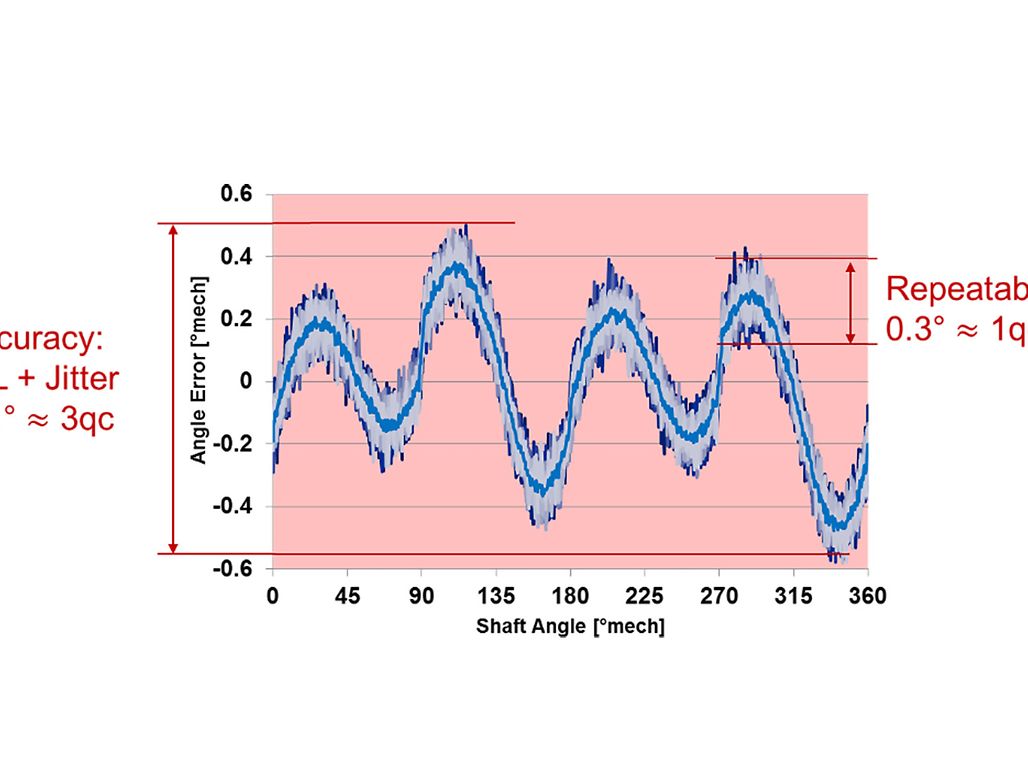
Exemplo da não-linearidade medida de um codificador magnético interpolado com 256 ipv. O desvio da posição perfeita é exibido como função do sinal do codificador (1024 quadcounts). O diagrama consiste em 25 medições de 1 volta. É possível ver claramente a repetição do desvio após uma volta. O desvio da posição absoluta média é de cerca de +/- 0.45° ou em termos de INL este é de cerca de 0,9°. Numa determinada posição do codificador, o ruído do sinal (instabilidade) é de cerca de 0,3°, o que corresponde exatamente a uma variação de 1 estado (360°/1024 = 0,35°).
O desvio máximo (pico a pico) é designado por Não-Linearidade Integral (INL). INL é importante nas aplicações que exijam uma precisão da posição absoluta. A repetibilidade — ou seja, o permanente alcance da mesma posição para um determinado valor de referência — não é afetada pela INL. A repetibilidade é antes uma questão de instabilidade de sinal que geralmente corresponde a menos de 1 estado.
Codificadores incrementais e posições absolutas?
Os codificadores incrementais fornecem apenas alterações da posição. Para o posicionamento absoluto, tem de ser primeiramente estabelecida uma posição inicial ou de referência. Isto é alcançado movendo o mecanismo para uma referência externa; este mecanismo pode ser um fim de curso mecânico ou um interruptor de fim de curso.
Alguns codificadores possuem um terceiro canal com um impulso por volta. Os flancos deste canal de índice fornecem referências de posição absoluta dentro de uma volta. A precisão limitada de referências externas pode ser melhorada através de um deslocamento adicional para um dos flancos do canal de índice. No entanto, o canal de índice não é um pré-requisito para o posicionamento. Na verdade, os fabricantes de máquinas tentam evitar a utilização do índice para o referenciamento, pois exige uma nova calibração se uma unidade do codificador do motor tiver de ser substituída. Além disso, alguns sistemas de controlo utilizam o canal de índice para efetuar uma verificação cruzada do sinal do codificador e monitorizar as contagens por volta do codificador.
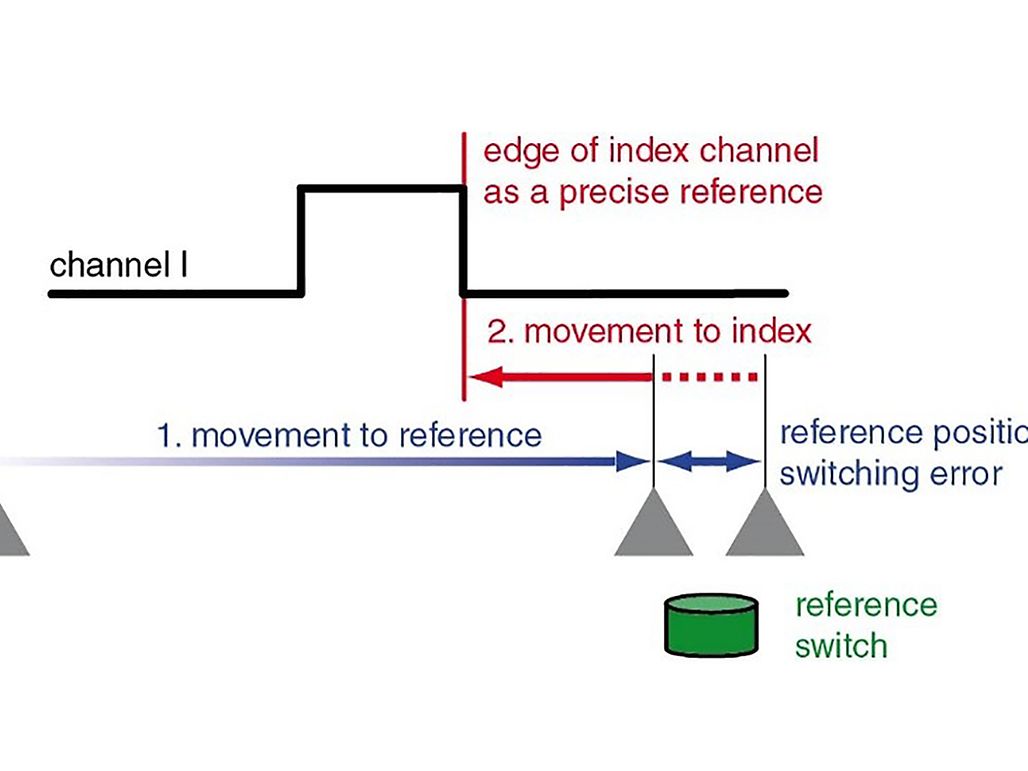
Melhoria da precisão da posição de referência através de um deslocamento adicional para o flanco do sinal do canal de índice.
O que deve ser observado ao transmitir o sinal?
Os controladores de linha são recomendados para a transmissão em linhas longas e para uma melhor qualidade de sinal. Para o posicionamento, um controlador de linha é praticamente uma obrigação, a fim de evitar a perda de impulsos do codificador.
Os controladores de linha geram sinais invertidos (Ā, B̄, Ī) para cada canal (A, B, I). Cada par de sinais é transmitido em conjunto e a diferença é avaliada, filtrando assim qualquer interferência eletromagnética durante a transmissão do sinal. Como efeito secundário benéfico, a qualidade do sinal é melhorada, os flancos do sinal são mais claramente definidos e a função do controlador permite a transmissão do sinal ao longo de distâncias mais longas (até cerca de 30 m).
Os codificadores necessitam de uma tensão de alimentação mínima. Em linhas de codificador longas, a resistência da linha e a queda de tensão correspondente podem ser um problema. Verifique a secção transversal do cabo e a tensão de alimentação.
Condições ambiente, robustez
A gama de temperaturas de serviço padrão dos codificadores é de -30 °C a +100 °C. Esta cobre a maioria das aplicações e o calor produzido pelo motor.
Em aplicações de vibração intensa e com choques mecânicos, é importante existir uma caixa mecânica robusta e um alívio adequado da tensão dos cabos.
Enquanto os codificadores óticos são menos sensíveis à interferência eletromagnética, os codificadores magnéticos necessitam de uma blindagem adequada contra os campos de dispersão magnética. Se a caixa não estiver adequadamente fechada e apertada, os codificadores óticos são sensíveis a pó.
Nas próximas publicações gostaria de analisar com mais detalhe a seleção de codificadores para o posicionamento e para o controlo de velocidade.