maxon Story
Robô pequeno em dimensão, grande em Open Source.


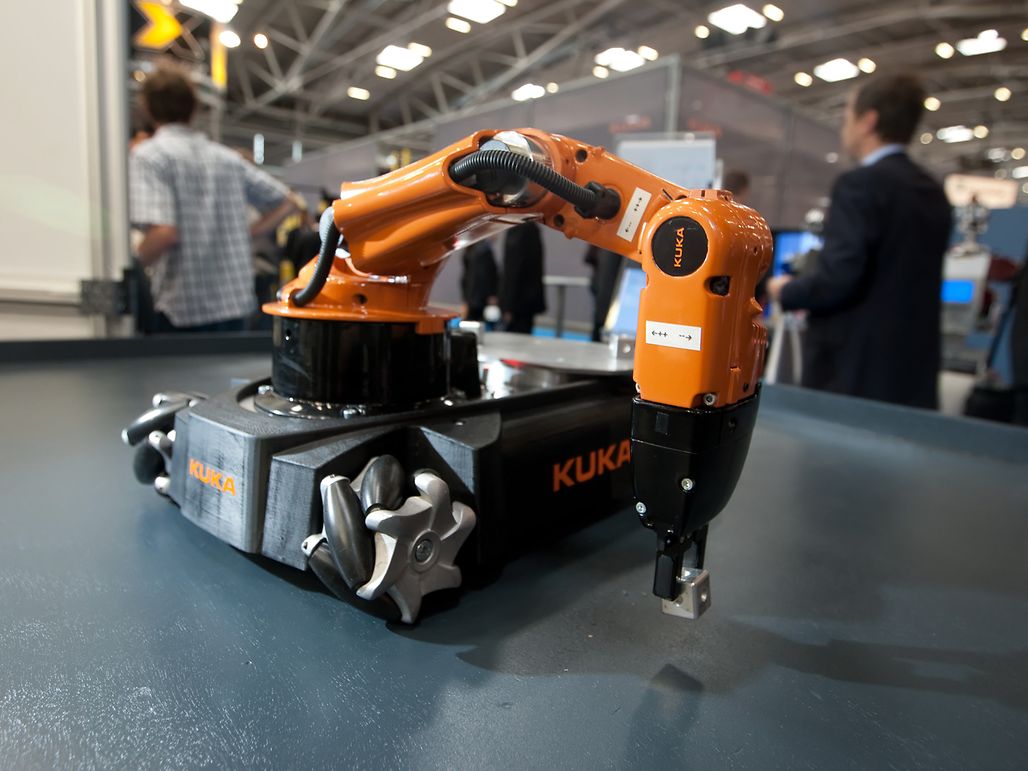
O KUKA youBot é um pequeno robô móvel desenvolvido como uma plataforma de Open Source para investigação científica e ensino. O robô consiste numa plataforma móvel e num braço robótico — os sistemas de acionamento da maxon asseguram o acionamento para estes componentes.


O software de comando do robô é um sistema de Open Source com base em Linux, que dispõe de uma série de interfaces abertas. © 2013 KUKA
Ensinar a um robô algo passo a passo e trocar ideias sobre os próprios programas é provavelmente um grande desafio para qualquer estudante de robótica. A fim de apoiar a investigação científica e o ensino em particular, a empresa KUKA, com sede em Augsburg, desenvolveu o robô youBot. Quase dois anos após o seu lançamento no mercado, o manipulador móvel controlado por software de Open Source, com uma base omnidirecional e um mecanismo robótico com cinco graus de liberdade, é considerado a plataforma de referência para a investigação e formação no campo da manipulação móvel. A KUKA, que até agora era conhecida principalmente como fabricante de robôs industriais em todo o mundo, criou assim uma plataforma de referência de Ope Source para a investigação robótica, que permite aos investigadores, responsáveis pelo desenvolvimento e estudantes de robótica criar o seu próprio software de comando e aplicação, por exemplo, para montar mesas IKEA ou transportar transportadores de carga pequena e componentes na “fábrica do futuro”.
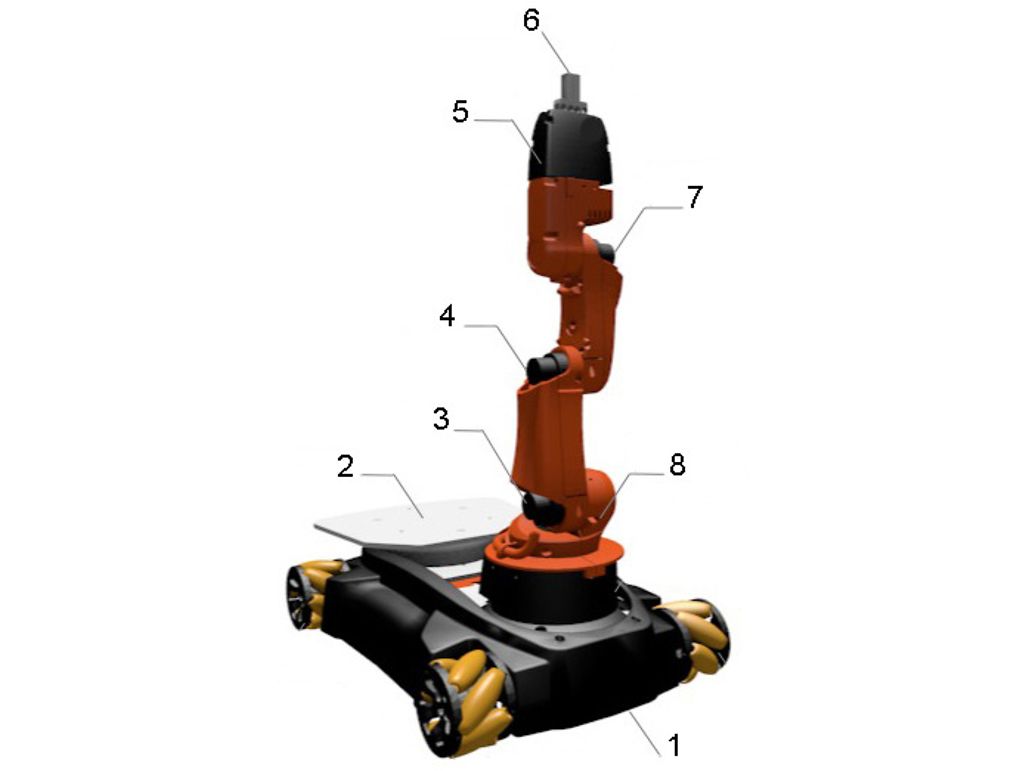
O KUKA youBot consiste num chassis omnidirecionalmente móvel e um ou dois braços robóticos montados no chassis. No chassis está integrado um PC industrial e uma bateria. O PC industrial comunica em tempo real (ciclo de 1 ms) via EtherCAT com o seu total de nove acionamentos, que podem ser operados com controlo de corrente, velocidade e posição. A plataforma do robô e o braço também podem ser utilizados independentemente um do outro. O chassis do youBot tem apenas 53 cm de comprimento, 36 cm de largura, pouco menos de 11 cm de altura e move-se sobre quatro rodas de Mecanum. Estas são rodas especiais, cujo piso consiste em rolos distribuídos num ângulo de 45° em torno da circunferência da roda, permitindo ao youBot sobrepor movimentos translatórios e rotatórios em qualquer momento. Isto permite movimentos omnidirecionais, incluindo movimentos laterais e diagonais.
Montado na plataforma está um braço de cerca de 66 cm de comprimento, na extremidade do qual está instalada uma garra com dois dedos, com a qual o robô pode mover objetos de até 70 mm de dimensão e até 500 gramas de peso. O braço robótico é composto por cinco articulações, todas movidas por sistemas de acionamento maxon. Para esta tarefa são utilizadas combinações de motor/redutor/encoder da maxon motor.
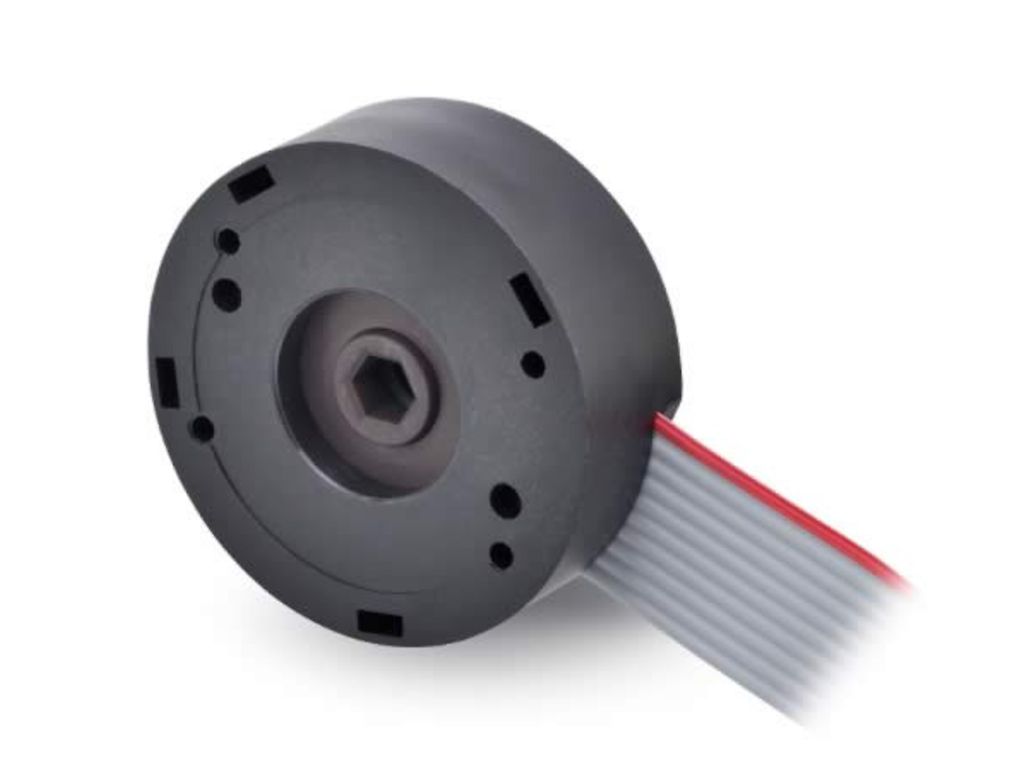
Redutores planetários especialmente desenvolvidos para a máxima liberdade de movimento
Uma vez que o espaço disponível no youBot é limitado, mas vários motores e redutores planetários ainda têm de ser instalados no braço e no chassis, estes componentes são integrados diretamente nas articulações do braço do robô. Para este fim, a maxon e a KUKA desenvolveram em conjunto um redutor especial particularmente leve, preciso e robusto, no qual a articulação pode rodar em torno do redutor planetário.
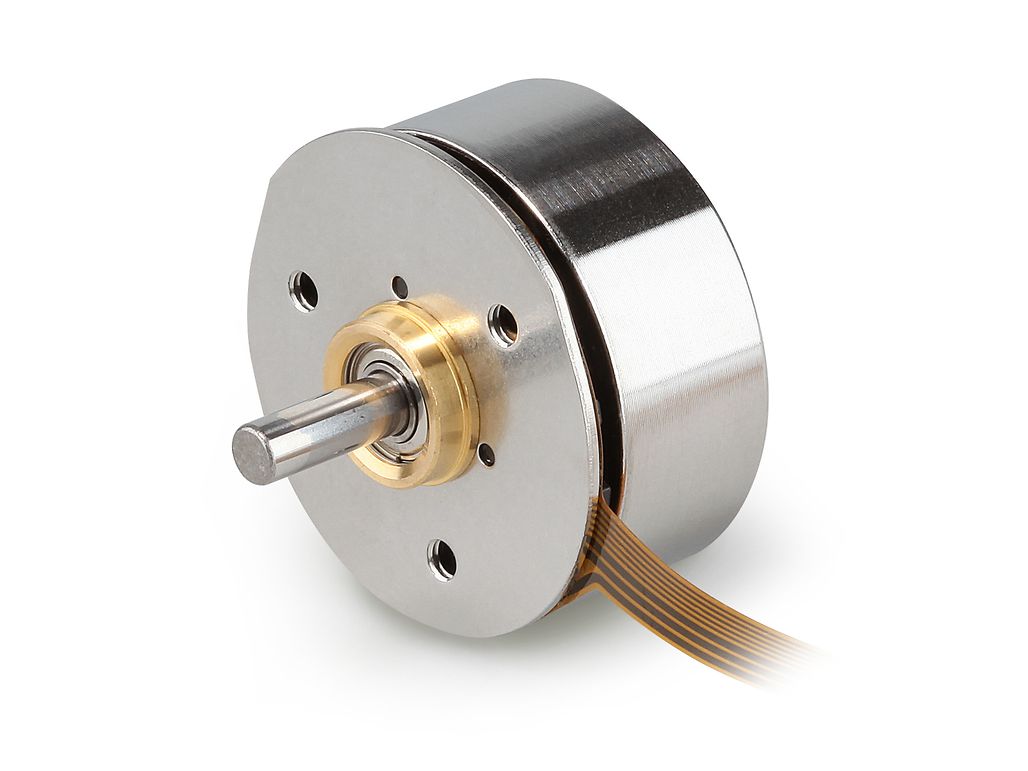
Um total de cinco motores planos maxon sem escovas (EC45 flat, EC32 flat) em combinação com redutores especiais e encoders são utilizados para as articulações do braço robótico. Quatro motores planos sem escovas EC 45 da maxon são utilizados para a plataforma. O maxon EC 45 flat sem escovas apresenta um design simples com uma elevada resistência ao binário, numa construção compacta. Os motores planos possuem uma potência de saída de 15 a 50 watts, mas pesam apenas de 46 g a 110 g. As articulações do braço robótico estão ligadas a codificadores de posição (encoder) maxon, para permitir a medição do ângulo das articulações.
O KUKA youBot já pode ser descrito como um marco na investigação e desenvolvimento da robótica. A KUKA adotou aqui deliberadamente uma abordagem completamente nova, a fim de se dirigir ao mercado da investigação e chegar à comunidade robótica, de modo a apoiar a transferência de tecnologia. Pois é precisamente o conceito de Open Source do robô com base em Linux que significa que não existem limites para investigadores e cientistas.