Expert Blog
Por que motivo a indústria necessita de novos sistemas de controlo de posição
Biren Patel, engenheiro de vendas na maxon motor, fala sobre a próxima geração de sistemas de controlo de posicionamento EPOS4 da empresa.
Este é um sistema de controlo de motores DC com duas potências diferentes e uma placa de conexão que permite a rápida integração nas máquinas. Os sistemas de controlo de posição são adequados para o controlo dinâmico de motores com e sem escovas, com uma potência contínua de até 750 W e uma potência de pico de até 1500 W.
Foram algumas as razões que nos levaram a desenvolver o novo Easy-to-use Positioning System (EPOS) (sistema de posicionamento de fácil utilização). Orgulhamo-nos de nos mantermos na vanguarda da tecnologia e de inovarmos continuamente. Este é um sistema de controlo de posição duas vezes e meia mais rápido do que os nossos sistemas de controlo EPOS2. Não irá substituir esses sistemas de controlo, mas sim complementá-los.
Os engenheiros podem ter uma aplicação que não necessite de um controlo de posição sofisticado, mas sim de algo que seja rápido. É aqui que o sistema de controlo EPOS4 da maxon motor entra em ação — para satisfazer aplicações que necessitam de algo entre sistemas de controlo de última geração e sistemas baseados em Digital Signal Processor (DSP) (processador de sinal digital) de gama baixa.
“Ao longo dos anos, temos tido clientes que nos pedem para tornar os sistemas de controlo mais compactos e com uma maior densidade de potência. Esse foi outro motivo que nos fez desenvolver o EPOS4. Os conectores de pinos do sistema de controlo fazem parte da placa principal, pelo que são fixos. A parte removível é uma placa compacta que é instalada em cima da placa principal, de modo a simplificar a configuração e a montagem de aplicações individuais.
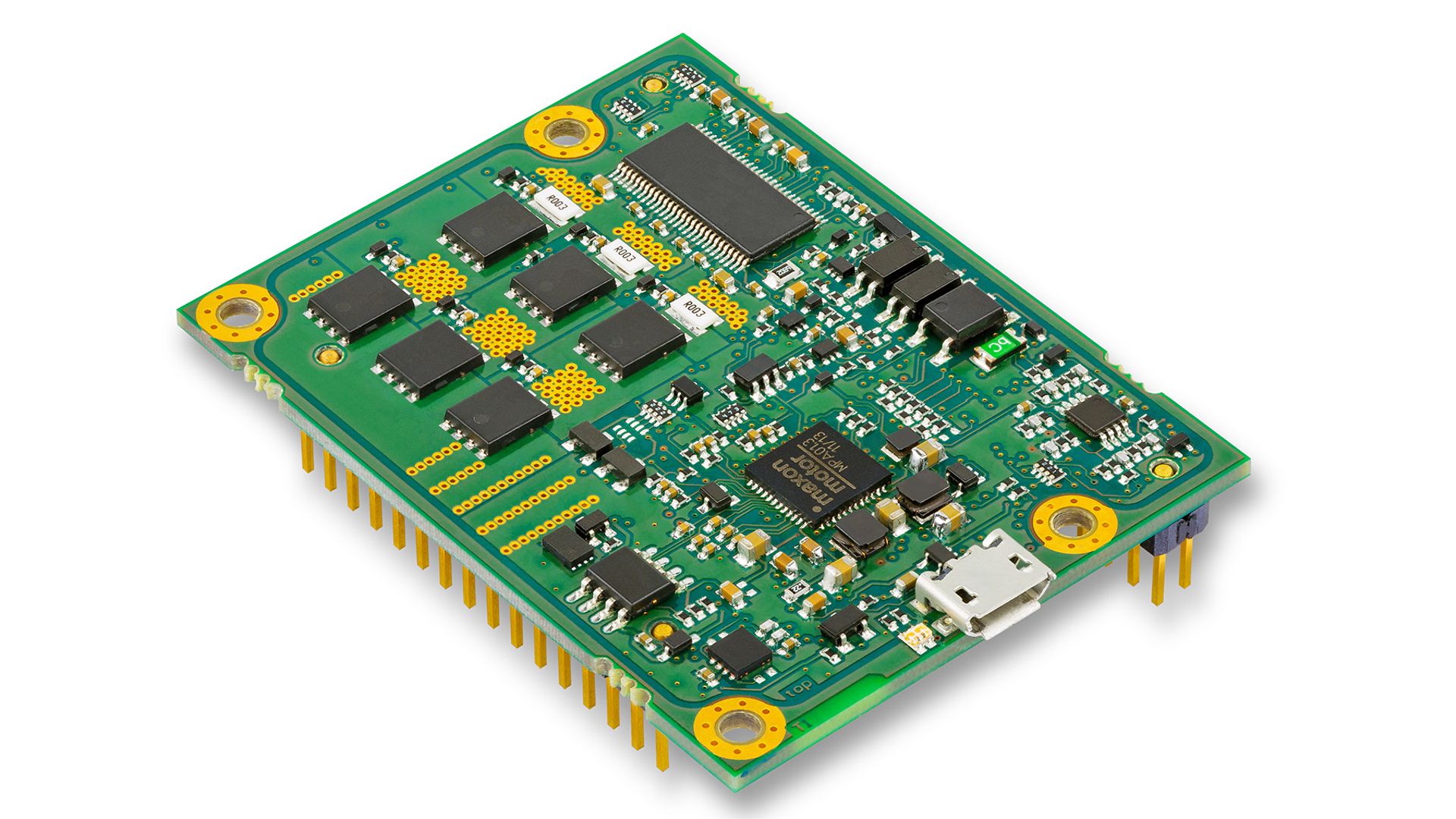
Sistemas de controlo de posicionamento EPOS para rápidas conexões
Pense nisto: se um engenheiro estiver a realizar uma análise de viabilidade ou trabalho de validação de conceito, um design tradicional do sistema de controlo forçaria esse engenheiro a aceder ao componente e a soldá-lo diretamente nos pinos — arriscando-se a curto-circuitar outros pinos ou a danificar a própria placa.
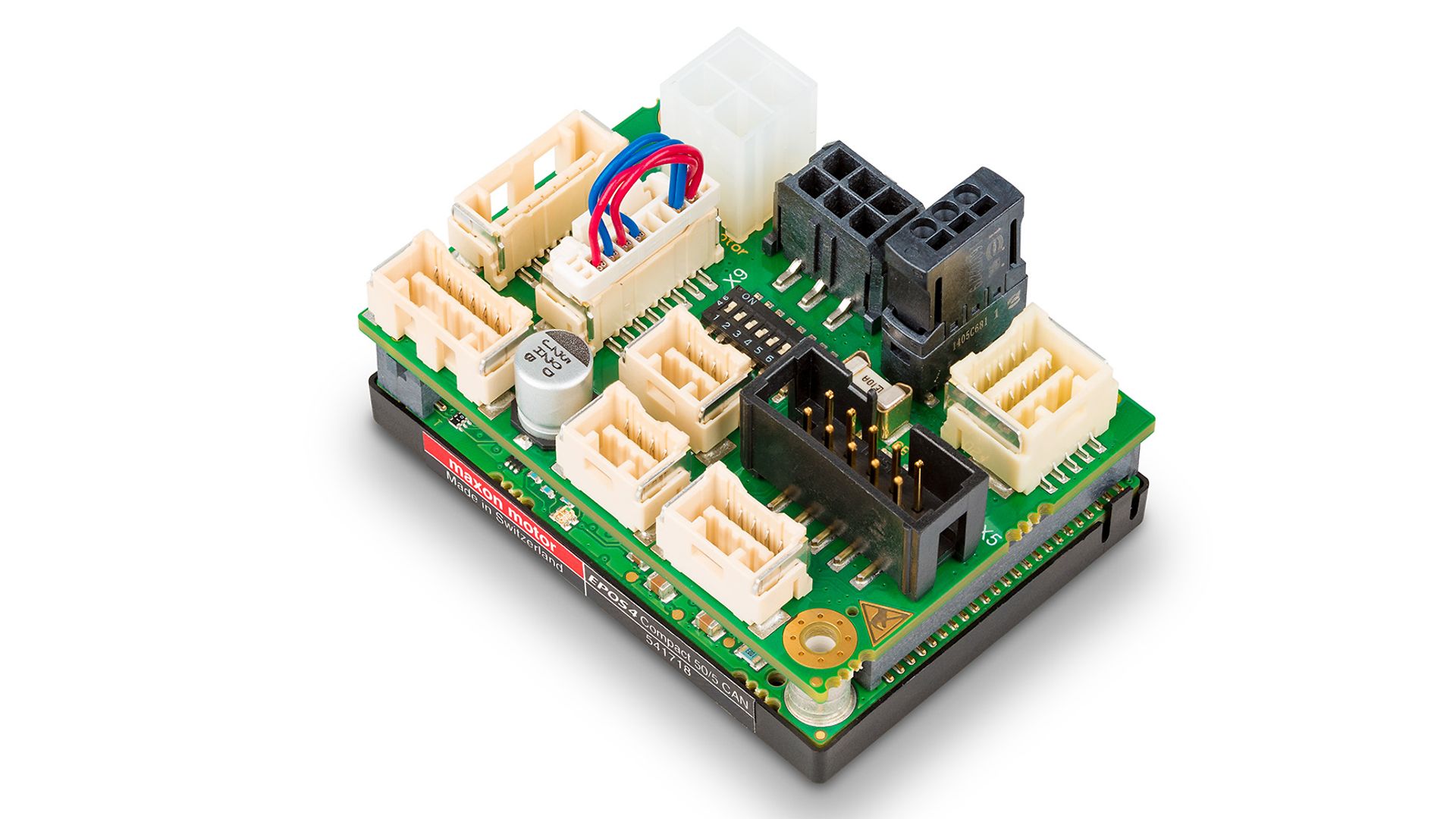
Pelo contrário, o nosso EPOS4 permite a instalação de uma placa compacta que os engenheiros podem adquirir e depois colocar no EPOS4. De seguida, podem facilmente utilizar os conectores para ligar diferentes tipos de motores e fontes de alimentação, bem como outros componentes de movimento, de modo a concluírem os testes de viabilidade.
Na verdade, o design modular estende-se também a outras características do sistema de controlo. Adicionámos um dissipador de calor opcional para aumentar a capacidade da placa do sistema de controlo. Também recomendamos dissipadores de calor adicionais para obter uma maior capacidade de corrente a temperaturas mais elevadas.
O modelo base da placa sem dissipador de calor tem uma potência de 8 A. Com o dissipador de calor conseguimos alcançar até 15 A de forma contínua. Adicione um dissipador de calor adicional e o sistema de controlo conseguirá uma potência de 15 A, mesmo com temperaturas ambiente superiores a 70 até 75° C, a plena carga.
Os sistemas de controlo EPOS2 e EPOS4 possuem bus de comunicação R232 USB e CANopen. O EPOS4 também irá incluir uma opção para comunicação EtherCAT. A comunicação USB com o EPOS2 e EPOS4 é geralmente utilizada para uma interface de serviço e de processo. Dispomos de um sistema de controlo de última geração designada MAXPOS — para o posicionamento — e esse apenas possui conectividade EtherCAT.
Na realidade, o sistema de controlo é um verdadeiro dispositivo EtherCAT slave e encaramos isso como uma característica importante, uma vez que a Ethernet é uma ferramenta cada vez mais utilizada. A minha opinião pessoal sobre este assunto é que existe um grande impulso para o EtherCAT, uma vez que todos querem poder mencionar a conectividade EtherCAT no seu marketing, mesmo para além das vantagens concretas da conectividade padrão. Existe uma outra razão para equiparmos o EPOS4 com comunicação EtherCAT.
Oferecemos o software EPOS Studio (gratuito) para que os engenheiros possam realizar mais análises de viabilidade de validação de conceito e configurações. O software Studio dispõe ainda de um registador de dados. É fácil de usar e inclui uma função de osciloscópio simples. Existem quatro canais que os engenheiros podem utilizar para monitorizar aspetos como a posição e, de seguida, verificar de que forma o comando compara com o que o motor está efetivamente a fazer.
Os engenheiros também podem utilizar o software para monitorizar a velocidade e a tomada da corrente, verificando, de seguida, o seu trabalho. Por exemplo, um engenheiro pode conceber um sistema de movimento linear com base num fuso roscado e utilizar depois o software EPOS Studio para assegurar que este não absorve mais do que uma determinada quantidade de corrente — ou garantir que é capaz de produzir uma determinada quantidade de binário.
O software EPOS Studio consegue ler todos estes valores e compará-los. É muito útil para configurar o acionamento — mas uma vez mais, esta é apenas uma das inúmeras características oferecidas. Os utilizadores podem simplesmente introduzir movimentos simples e registar todos os dados relacionados com a saída do movimento, de maneira a ter uma melhor perceção do funcionamento do seu sistema. Clique aqui para mais informações: