Expert Blog
Controlo de circuito dual: sem folgas nas engrenagens
As cargas podem ser posicionadas dinamicamente, com elevada precisão e sem oscilação, apesar da folga mecânica e dos componentes elásticos? Sim — através de um sistema inteligente.
A movimentação de cargas com um acionamento elétrico é geralmente realizada com um sistema que utiliza um codificador no veio do motor, para fornecer a informação da posição e da velocidade para controlo. A alta resolução do codificador e a deteção precisa da reação do veio do motor são essenciais para o controlo dinâmico da posição. Contudo, do ponto de vista da aplicação, é, em última análise, a precisão do movimento da carga do lado da saída que é crucial para precisão dimensional e qualidade dos bens produzidos. Os redutores, os fusos e as correias de acionamento podem aqui ter um efeito negativo. Dependendo da direção do movimento, a folga da engrenagem pode resultar numa posição de carga diferente no lado da saída. A elasticidade pode provocar atrasos e oscilações no início ou paragem do movimento. A primeira solução que me ocorre é montar o codificador no veio de saída, em vez de o montar no veio do motor. No entanto, isto resulta num desempenho do sistema ainda pior.
No caso de um mecanismo com folga ou elasticidade, o posicionamento dinâmico e preciso da carga requer a utilização de um sistema em que o controlo se baseie em dois sistemas codificadores:
- Um codificador rotativo, o codificador auxiliar, está firmemente conectado ao veio do motor. Já deve fazer parte da combinação do motor.
- Um outro codificador, o codificador principal, está conectado à carga movida no lado da saída.
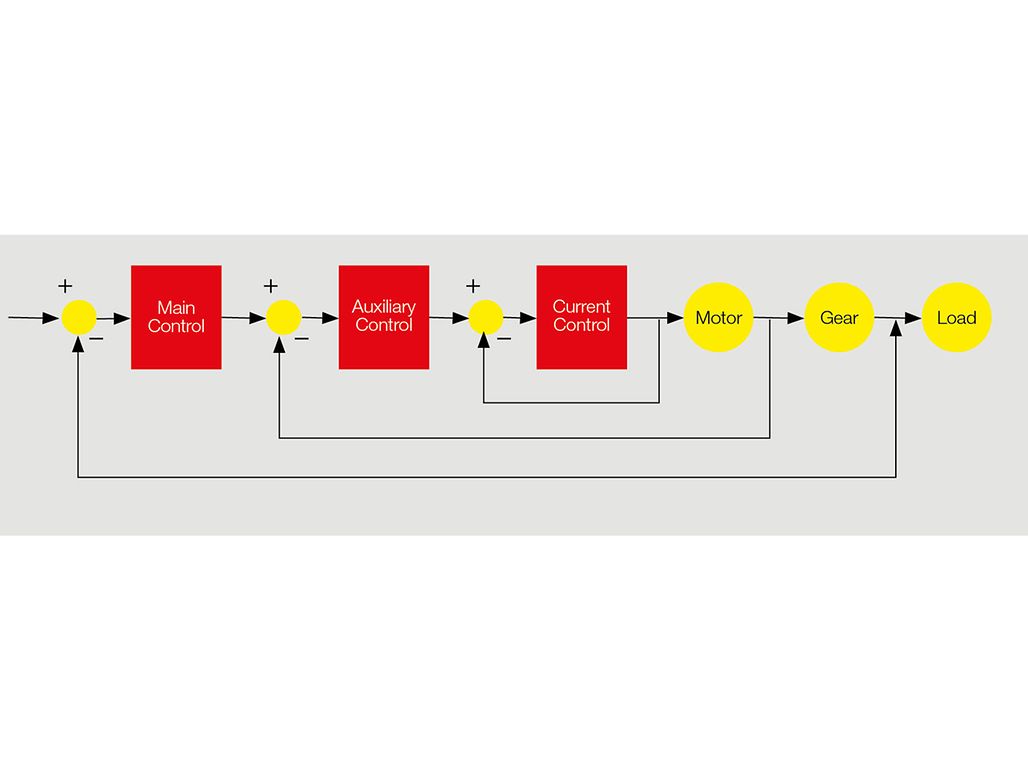
Figura 1 A arquitetura do circuito dual consiste em três circuitos de feedback integrados.
Para processar os sinais destes dois sistemas codificadores, é necessário um controlo do circuito dual. Os sistemas de controlo de posicionamento EPOS4 da maxon aumentam este controlo do circuito dual com um filtro de segunda ordem e um escalonador de ganho para contrariar a ressonância mecânica e a folga da engrenagem. O software de comissionamento EPOS Studio fornece uma ferramenta de “Regulation Tuning” que determina automaticamente os parâmetros para a complexa estrutura do sistema de controlo. Também traça a função de transferência do acionamento.
Arquitetura de controlo
O EPOS4 utiliza uma estrutura de controlo em cascata para o controlo de circuito dual (ver Figura 1):
- O circuito de controlo mais interno permite um controlo orientado ao campo (= FOC) da corrente do motor, com base na medição da corrente do motor como um sinal de retorno.
- O circuito de controlo intermédio (controlo auxiliar) controla a velocidade do motor com base no codificador no veio do motor.
- O circuito de controlo mais externo (controlo principal) controla a posição da carga com base no sistema codificador na carga.
Uma vista detalhada na estrutura do controlo de circuito dual EPOS4 é mostrada na Figura 2.
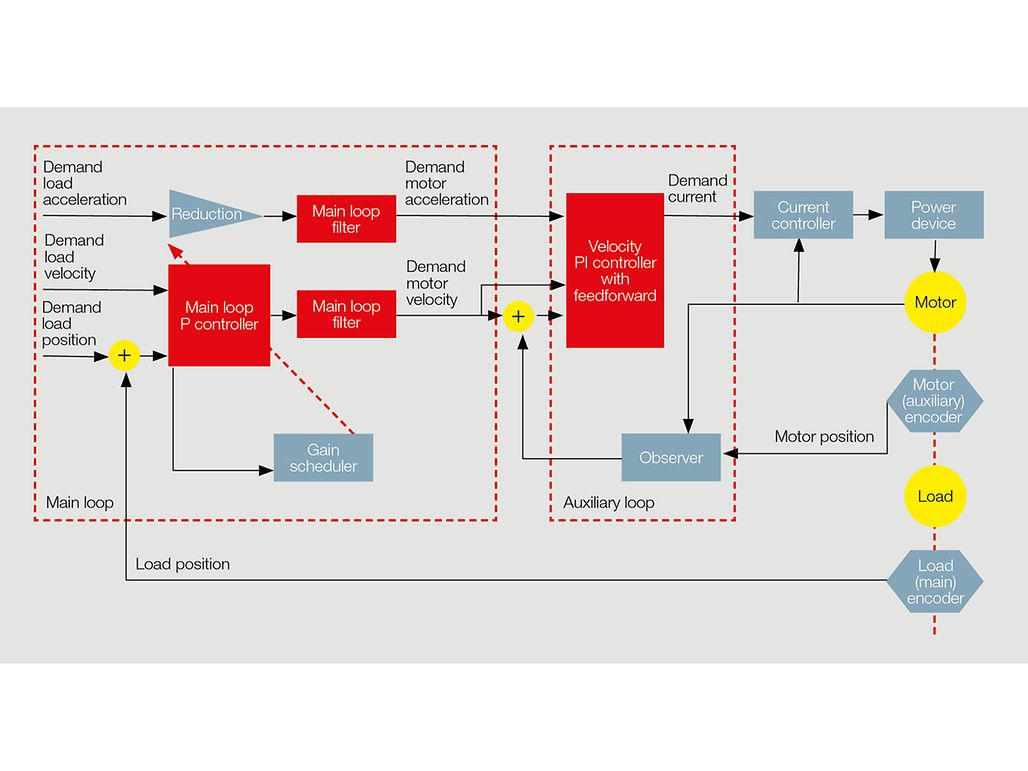
Figura 2 Uma vista detalhada de todos os componentes do sistema de controlo de circuito dual.
Circuito de controlo principal
O circuito de controlo principal é composto por um regulador proporcional (P), um escalonador de ganho e um filtro de segunda ordem (filtro do circuito principal). Um planeador de percurso fornece a posição desejada da carga e a sua velocidade e aceleração desejadas como variáveis de entrada para o circuito de controlo principal. Outra variável de entrada é a posição atual da carga, medida pelo codificador na mesma.
- Escalonador de ganho
O controlo de circuito dual EPOS4 utiliza o escalonador de ganho para eliminar os efeitos negativos da folga da engrenagem. Para tal, o escalonador de ganho ajusta automaticamente o ganho P do circuito de controlo principal. Se o erro de seguimento — o desvio da posição real da carga da posição desejada — for demasiado grande, será aplicado um ganho P elevado, resultando numa rápida redução do erro. À medida que o erro de seguimento se torna mais pequeno, o ganho P também é reduzido, para que não ocorra oscilação no acionamento, apesar da folga da engrenagem.
- Filtro do circuito principal
Se existir uma determinada quantidade de elasticidade entre o motor e a carga devido aos acoplamentos, correias ou fusos compridos, as frequências de ressonância podem provocar um aumento das oscilações. Estes poderiam aumentar ao ponto de o controlo se tornar instável. Para prevenir essa situação, o sistema de controlo de circuito dual EPOS4 utiliza um filtro de segunda ordem, do tipo do filtro rejeita-banda. Este filtro suprime a gama de frequência de ressonância no sinal de saída do circuito de controlo principal, evitando assim oscilações harmónicas no sistema de tração.
Circuito de controlo auxiliar
O circuito de controlo auxiliar consiste num regulador proporcional-integral (PI) com alimentação em avanço (FF) e um observador que estima a velocidade do motor a partir dos dados de posição do codificador do motor e das medições da corrente do motor.
Procedimento de autossintonização
Para simplificar a colocação em funcionamento, o software EPOS Studio da maxon inclui um assistente de autossintonização para determinar e validar os parâmetros do sistema de controlo de circuito dual. O procedimento de autossintonização é composto por duas experiências que são realizadas automaticamente.
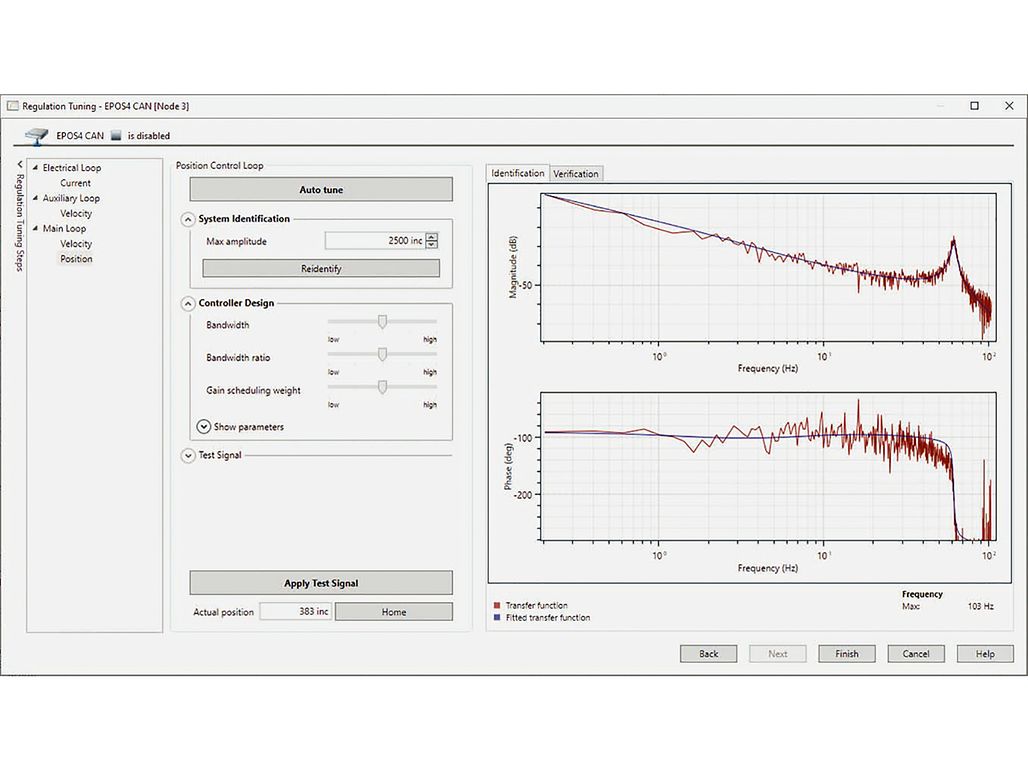
Figura 3 Exemplo da função de transferência identificada com recurso ao EPOS4, com ressonância.
- A experiência 1 provoca oscilações do veio do motor. Estas oscilações são utilizadas para determinar a inércia de massa, a constante do binário e a fricção no motor. Os parâmetros para o sistema de controlo do circuito auxiliar e o observador são, depois, calculados com base nos dados identificados.
- A experiência 2 é utilizada para calcular os parâmetros do circuito de controlo principal e do filtro rejeita-banda. Para acionar a instalação, é utilizado um sinal PRBS (= Pseudo-Random Binary Sequence — Sequência binária pseudoaleatória). Com base nos dados de entrada/saída resultantes, a função de transferência é identificada e apresentada como um diagrama de Bode (ver Figura 3).
O diagrama de Bode pode ser exportado. Este assiste os técnicos de controlo na análise do sistema para a otimização do design mecânico e adaptação manual do controlo para aplicações específicas.
Comparação entre controlo de circuito simples e controlo de circuito dual
Os seguintes gráficos mostram as diferenças na resposta de referência e erro de seguimento para um sistema com folga de engrenagem (Figura 4) e um sistema com um acoplamento elástico (Figure 5). Os gráficos comparam o controlo de circuito simples com um codificador na carga e o controlo de circuito dual sintonizado automaticamente com um codificador tanto no veio do motor como na carga.
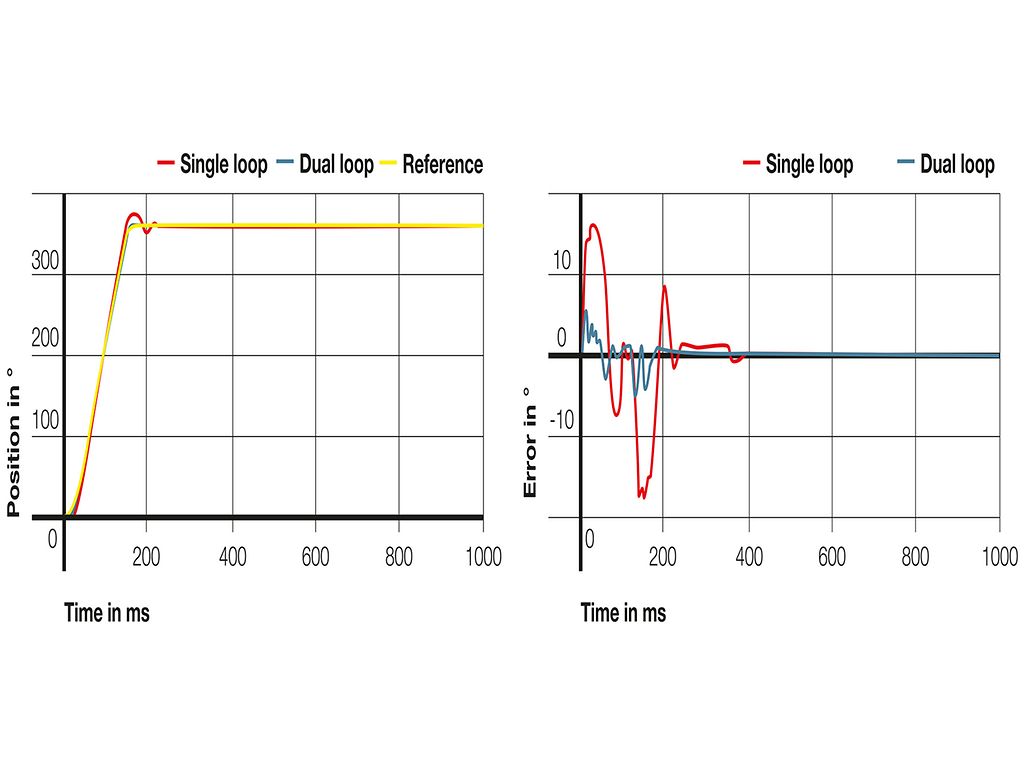
Figura 4 Perfil da posição de carga de um sistema com folga de engrenagem: resposta de referência (em cima) e erro de seguimento (em baixo).
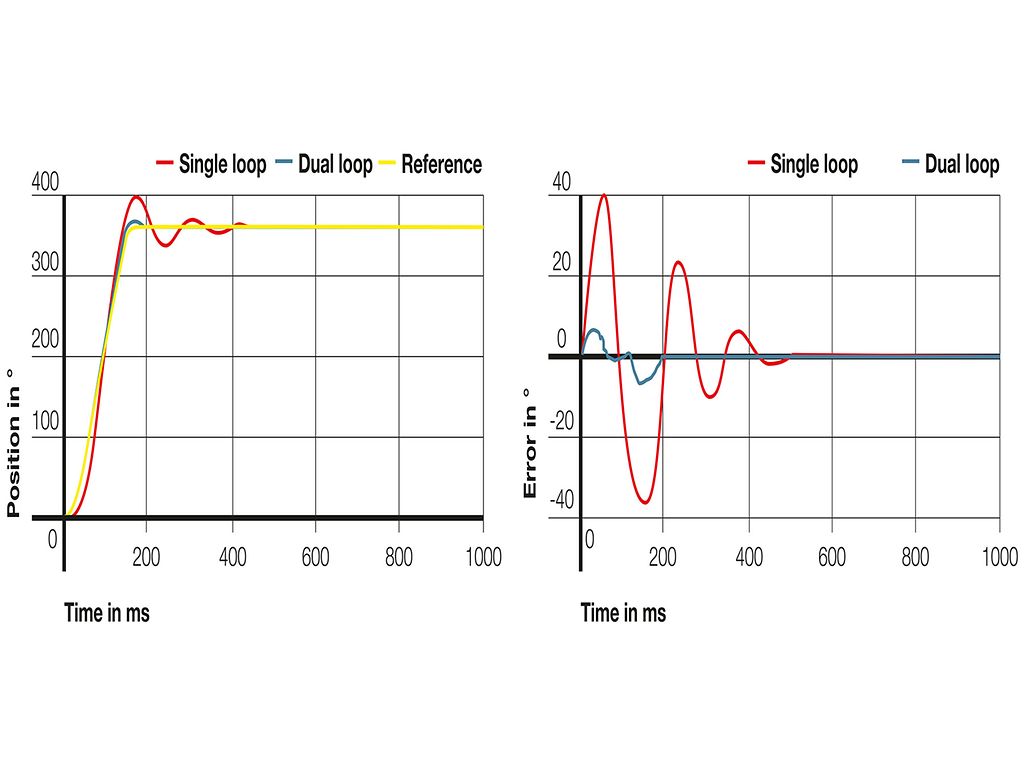
Figure 5 Perfil da posição de carga de um sistema com elasticidade. Reposta de referência (em cima) e erro de seguimento (em baixo).
O controlo de circuito dual é uma forma de tornar os sistemas de acionamento mais precisos e mais eficientes. A maxon oferece não só todos os componentes necessários, como também uma grande experiência em consultoria — da ideia inicial e design do sistema à produção comercial em grande escala.