Young Engineers Program
한 단계 업그레이드

계단은 여전히 많은 로봇에게 극복할 수 없는 장애물입니다. 그러나 취리히 ETH의 젊은 팀은 점프를 통해 계단을 쉽게 통과하도록 설계한 차량을 제작하고 있습니다.
“아센토”(Ascento)는 제작자인 기계공학을 전공하는 여덟 명의 학생과 전기공학을 전공하는 한 명의 학생으로 구성된 팀이 이 정교한 장치에 붙인 이름입니다. 이 로봇은 매우 특별합니다. 두 바퀴로 움직이고 균형을 잡습니다. 공학적 관점에서 네 바퀴로 장치를 만드는 것보다 훨씬 더 어렵습니다. 그러나 이족 보행 로봇은 다양한 지형 유형에 훨씬 더 나은 이동성과 적응력을 제공합니다.
이것이 전부는 아닙니다. 이 전도유망항 아홉 명의 엔지니어들이 세운 주요 목표는 로봇을 도약시키는 것입니다. 이들은 이 로봇은 캥거루처럼 높이 점프할 수 있고 두 바퀴로 다시 안전하게 착륙시키고자 합니다. “이렇게 하면 로봇이 계단과 기타 장애물을 정복할 수 있습니다.”라고 학생인 플로리안 베버(Florian Weber)는 설명합니다. 아센토 팀은 한 포커스 프로젝트에서 시작되었습니다. 이러한 유형의 프로젝트에서 다양한 학과의 학부생들은 초기 아이디어에서 작동하는 프로토타입까지 구체적인 프로젝트에 자신의 지식을 적용할 수 있는 기회를 갖습니다.
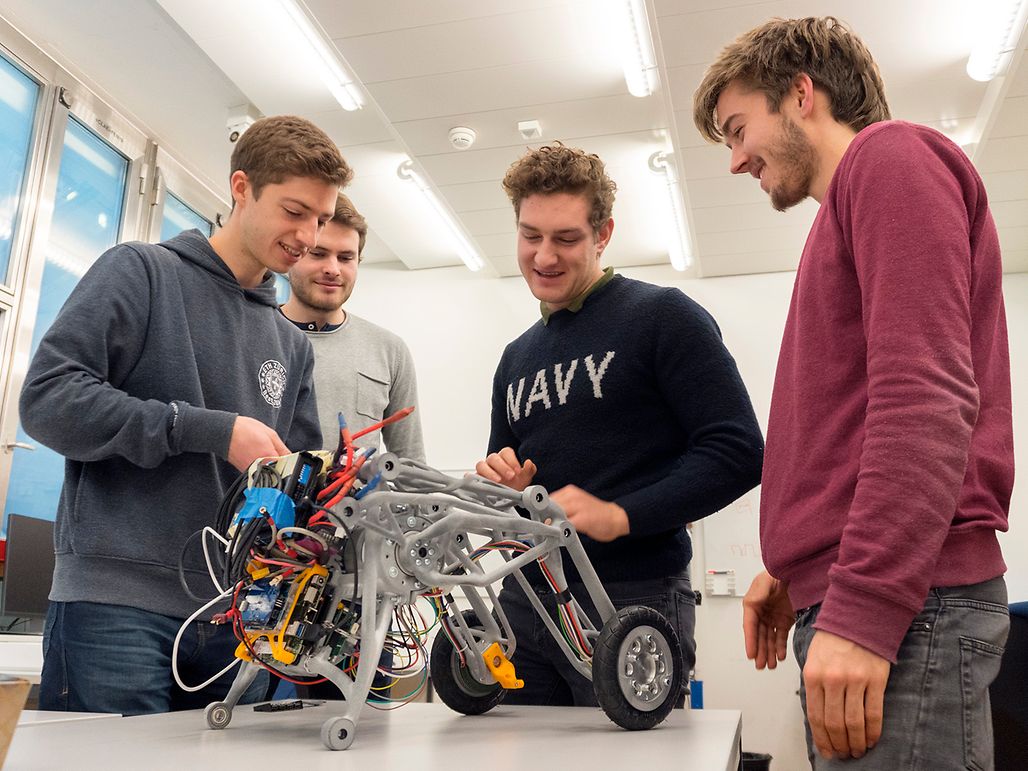
좌측부터: 치로 장츠만(Ciro Salzmann), 마르쿠스 피어나이젤(Marcus Vierneisel), 리오넬 굴리치(Lionel Gulich), 플로리안 베버(Florian Weber)
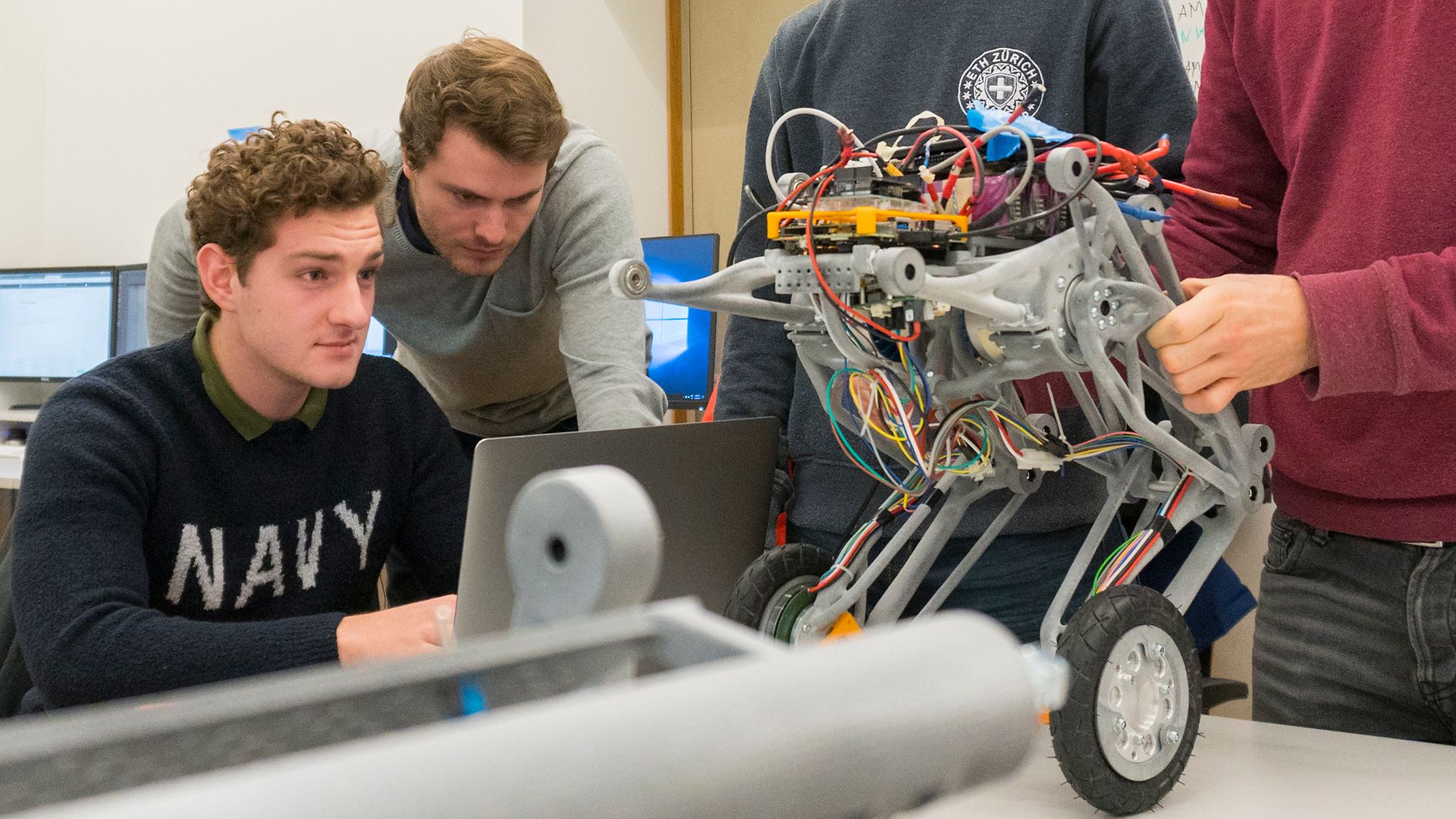
아센토의 특징은 역진자로 설계되었다는 점입니다. 무게 중심은 축 위에 있습니다. 결과적으로 아센토는 전원이 공급되는 동안에만 서서 움직일 수 있으며 바퀴에서 능동적으로 균형을 유지할 수 있습니다. 이는 균형을 유지하기 위해 지속적으로 에너지를 소비해야 하는 서 있는 인간과 유사합니다. 따라서 아센토는 같은 축에 있는 두 개의 바퀴로 구동되며 균형을 유지하기 위해 제어된 드라이브가 필요한 세그웨이(Segway)와 비슷합니다.
좌측부터: 플로리안 베버(Florian Weber), 도미니크 만하르트(Dominik Mannhart)
아센토의 잠재적인 애플리케이션은 예를 들어 건물 검사입니다. 예를 들어, 이 차량은 불이 났거나 붕괴 위험이 있는 집에 들어갈 수 있습니다. 내장 카메라는 건물 밖에 있는 구조대원들에게 귀중한 정보를 전달할 것입니다. 이러한 목적을 위한 로봇은 이미 여러 종류가 있습니다. 하지만, “특히 계단을 오를 때 많은 로봇은 능력의 한계에 도달합니다.”라고 아홉 명의 포커스 그룹의 구성원이기도 한 마르쿠스 피어나이젤(Marcus Vierneisel)은 말합니다. 아센토의 목표는 인간의 보행 속도로 계단을 오를 수 있도록 하는 것입니다. 어땠든 아센토는 경량 이륜 설계로 인해 다른 로봇보다 민첩합니다. “이에 반해, 더 큰 로봇은 환경과 상호 작용할 수 있습니다. 이것은 아센토가 할 수 없는 일입니다.”라고 기계공학과 학생인 리오넬 굴리치는 덧붙여 말합니다. 센서가 장착된 아센토는 건물을 정찰하고 단시간에 방의 3D 스캔을 전달할 수 있습니다. 물론 프로토타입은 아직 자체적으로 건물 전체를 정찰할 수 없습니다. 그러나 원격 제어로 계단에 접근한 다음 센서를 사용하여 각 계단을 오르는 데 필요한 점프의 높이와 길이를 측정하고 계산할 수는 있습니다. “원격으로 각 점프를 트리거하는 일은 너무 복잡하고 느립니다.”라고 플로리안 베버는 말합니다. 이로써 아센토는 반자율 로봇 범주에 속하게 되었습니다.
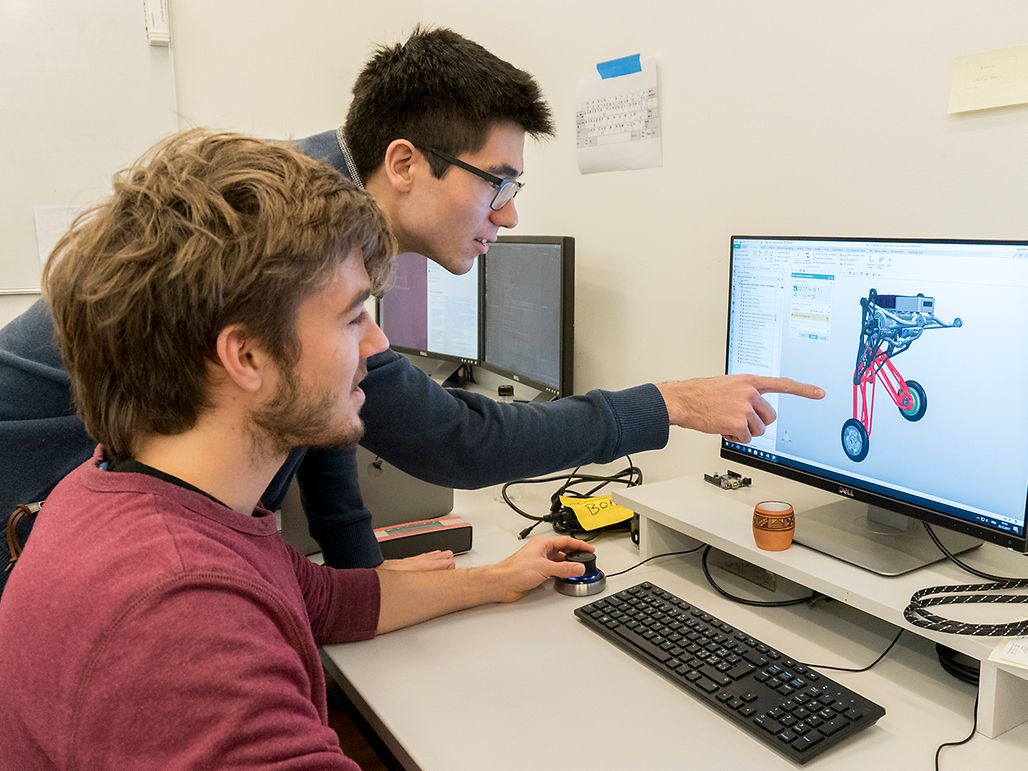
포커스 프로젝트와 아센토의 프로토타입이 결국 상업적 생산을 할 수 있는 검사 로봇이 될지는 여전히 불확실합니다. 그러나 이것이 주요 목표는 아닙니다. 포커스 프로젝트의 주요 목표는 ETH 학생들이 이론을 주입하는 대신 실제 프로젝트에서 시도하도록 하는 것입니다.
학생들은 Young Engineers Program(YEP)의 일환으로 드라이브 전문 제조업체인 맥슨 모터로부터 기술 및 재정 지원을 받고 있습니다. 아센토의 드라이브에는 맥슨 EC 90 플랫 모터 2대가 장착되어 있습니다. 기술적으로, 이러한 모터가 전달하는 963mNm의 토크는 로봇이 단일 평면을 따라 이동할 때 다소 과도합니다. 높은 토크와 정밀한 제어가 필요하기 때문에 좁은 계단에 착지한 후 아센토의 균형을 잡을 때 드라이브가 자체적으로 작동합니다. ETH 학생들은 프레임리스 모터 버전을 사용하기로 결정했습니다. 회전자와 고정자는 별도로 그리고 출력 샤프트 없이 인도됩니다. 회전자와 고정자는 시스템 통합 중에만 연결됩니다. 특히 로봇 공학에서, 맥슨의 프레임리스 모터는 공간을 절약하고 관절 구조에 정밀하게 통합할 수 있기 때문에 보통 첫 번째 선택이 됩니다. 각 모터는 EPOS4 모듈에 의해 구동됩니다.
이미지 저작권
안드리안 베네츠(Adrian Venetz) / 맥슨 모터