Expert Blog
진정한 초소형 EPOS4!

로봇, 분석 및 처리 시스템에는 고도로 동적인 컨트롤러 및 네트워크화된 버스 시스템과 결합되고 에너지 효율적인 많은 소형 드라이브가 컴팩트하게 통합되어야 합니다. 맥슨은 이에 도전할 준비가 되어 있습니다.
요구 사항: 컴팩트형 다축 시스템 컨셉트
수술용 로봇, 의료 기기 및 실험실 기술용 분석 기기, 방사선 기술용 다엽 콜리메이터와 같은 제품에는 설치 공간에 견고하게 고정될 수 있는 소형화된 드라이브 시스템이 필요합니다. 이상적인 드라이브 패키지에는 전기 모터뿐만 아니라 모터 및 센서 근처의 장치에 직접 통합시킬 수 있고 네트워킹이 가능한 소형 모터 컨트롤러도 포함됩니다.
중점 사항: 소형화된 모터 컨트롤러
모터 컨트롤러의 주요 속성은 모든 구성품이 공간을 절약하여 통합되도록 하는 높은 전력 밀도와 높은 에너지 효율입니다. 고속 버스 인터페이스뿐만 아니라 다양한 센서 및 액추에이터용 커넥터도 동일하게 중요합니다. EPOS4 Micro 모듈은 표준화된 넓은 기능 범위, 최첨단 제어 알고리즘, 소형 출력단, CANopen 또는 EtherCAT 인터페이스를 제공하지만 우표보다는 크지 않습니다(32 × 22 × 7mm). 장치 제조업체는 필요한 축의 수에 맞추어 자신의 전자 장치에 플러그인 모듈을 통합시킬 수 있습니다. 이로써 비용이 최적화된 초소형 크기의 다축 시스템을 생산할 수 있습니다.
버스 인터페이스, 전체 시스템의 척수
버스 인터페이스를 통해 각 드라이브 유닛은 빠른 주기로 명령 및 액세스 데이터를 마스터 컨트롤러(예: PLC 또는 맥슨 MasterMACS)와 교환합니다. 이를 위해 사용되는 일반적인 필드버스 시스템은 CANopen 및 EtherCAT입니다. EtherCAT의 매우 높은 전송 속도는 특히 복잡한 다축 애플리케이션에 이점으로 작용하지만, 개별 축을 연결하기 위해 추가 하드웨어와 표준화된 대형 RJ45 커넥터가 필요하다는 단점이 있습니다. 컨트롤러와 버스 커넥터의 크기는 때때로 휴대형 장치 및 로봇 공학에서 EtherCAT 사용에 대한 장애 요인이 될 수 있습니다.
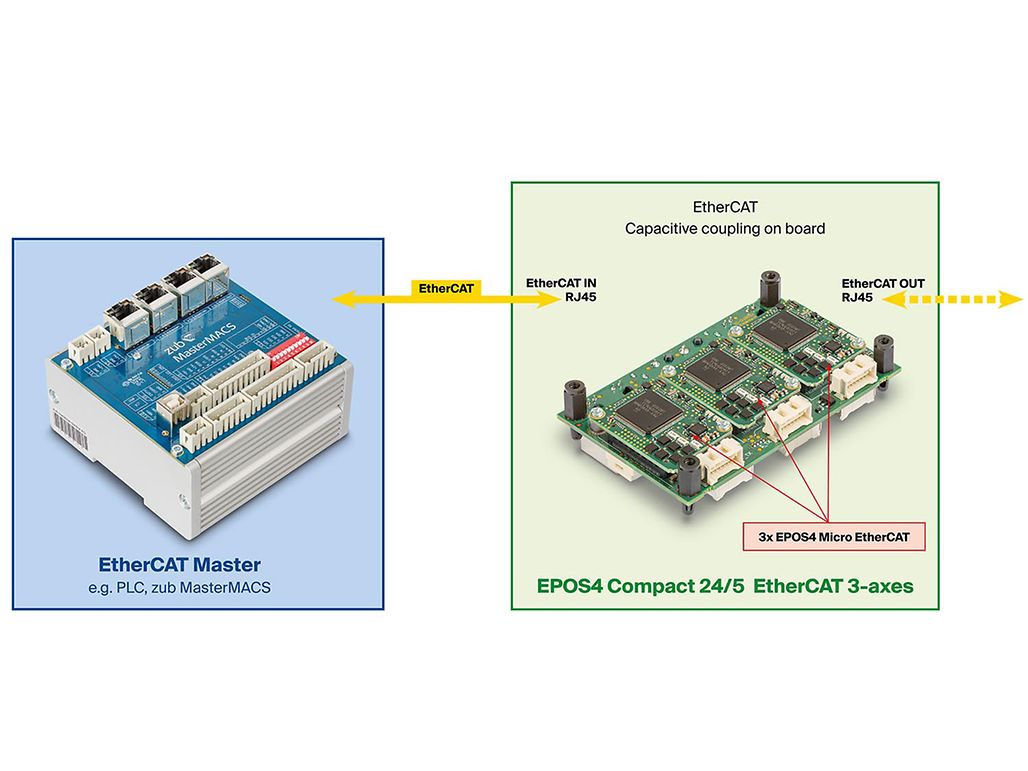
외부 RJ45를 통한 커플링 3축 보드의 내부 용량 커프링
초소형, EtherCAT으로도 가능
EtherCAT은 유도 변환기를 사용하여 전위차를 기반으로 DC 신호 구성품을 차폐하고 간섭을 억제하며 신호 무결성을 보장합니다. 그러나 이러한 구성품과 RJ45 커넥터는 인쇄회로기판에 많은 공간을 필요로 하며 각 드라이브 컨트롤러에 대해 별도로 통합해야 하는 경우 비용이 증가합니다. 여러 EPOS4 Micro 유닛이 동일한 전자 보드에 통합되어 있으면, 대안으로서 용량 커플링을 사용하여 EtherCAT 포트를 내부에서 연결할 수도 있습니다. 이것은 매우 컴팩트하고 비용을 절감하는 솔루션입니다. 그러면 RJ45 커넥터는 외부 EtherCAT 연결에만 필요합니다. 맥슨은 이러한 원리에 따라 EPOS4 Micro 24/5 EtherCAT 모듈이 세 개 장착되어 있고 설치 크기가 90 × 56mm(명함 크기)인 초소형 다축 컨트롤러를 공급합니다.
초소형, 통합 용이성
CANopen 또는 EtherCAT을 통한 EPOS4 Micro의 데이터 교환 및 명령 기능은 CiA® 402 프로토콜(드라이브 및 동작 제어용 장치 프로필)을 사용합니다. 다음의 표준화된 작동 모드를 지원합니다. “PPM - 프로필 위치 모드”, “PVM - 프로필 속도 모드”, “HM - 원점 복귀 모드”, “CSP - 주기적 동기 위치”, “CSV - 주기적 동기 속도” 및 “CST - 주기적 동기 토크”. EPOS4 Micro(모든 EPOS4 버전과 동일)는 표준화된 동작 제어 슬레이브로서 다양한 PLC 제조업체의 시스템 관리자 도구 및 동작 라이브러리에 통합시킬 수 있습니다. 맥슨의 EPOS 명령 라이브러리를 통해 PC 또는 라즈베리 파이(Raspberry Pi)에서 명령하는 애플리케이션도 가능합니다.
초소형, IIoT에 대비
EPOS4는 기계 또는 드라이브 트레인의 IIoT(산업용 사물 인터넷) 환경에서 최하위 정보 공급자입니다. EPOS4 버스 인터페이스를 통해 모터 전류 및 토크, 위치 값, 오류 상태, 컨트롤러 및 모터의 온도 및 부하 값, 외부 센서 및 액추에이터 상태에 액세스하거나 데이터를 주기적으로 전송할 수 있습니다.
초소형이지만, 다기능
25kHz의 전류 컨트롤러 주기와 2.5kHz의 속도/위치 제어 주기를 사용하는 EPOS4 Micro의 주기율은 EPOS4 제품 라인의 다른 모든 버전과 동일합니다. 자속 기준 제어(Field Oriented Control: FOC), 피드 포워드(Feed Forward) 및 옵저버 제어(Observer Control), 이중 루프 제어(Dual Loop Control)과 같은 최신 컨트롤러 컨셉트를 통해 EPOS4 Micro는 최대의 모터 성능과 정확한 움직임을 제공할 수 있습니다. 모터 샤프트에 위치한 증분형 인코더와 출력 샤프트에 위치한 SSI 인코더를 사용한 이중 루프 제어로 백래시가 있는 드라이브 시스템 또는 탄성 드라이브 시스템에서도 하중의 위치를 정밀하게 제어할 수 있습니다.
초소형이지만, 다양한 용도
EPOS4 Micro는 홀 센서, 디지털 증분형 인코더 및 SSI 절대 인코더가 장착된 브러시드 및 브러시리스 DC 모터를 지원합니다. 총 5개의 디지털 입력부, 3개의 디지털 출력부, 2개의 아날로그 입력부(+/–10V) 및 1개의 아날로그 출력부(+/–4V)를 통해 추가 액추에이터 및 센서를 연결하고 평가할 수 있습니다.
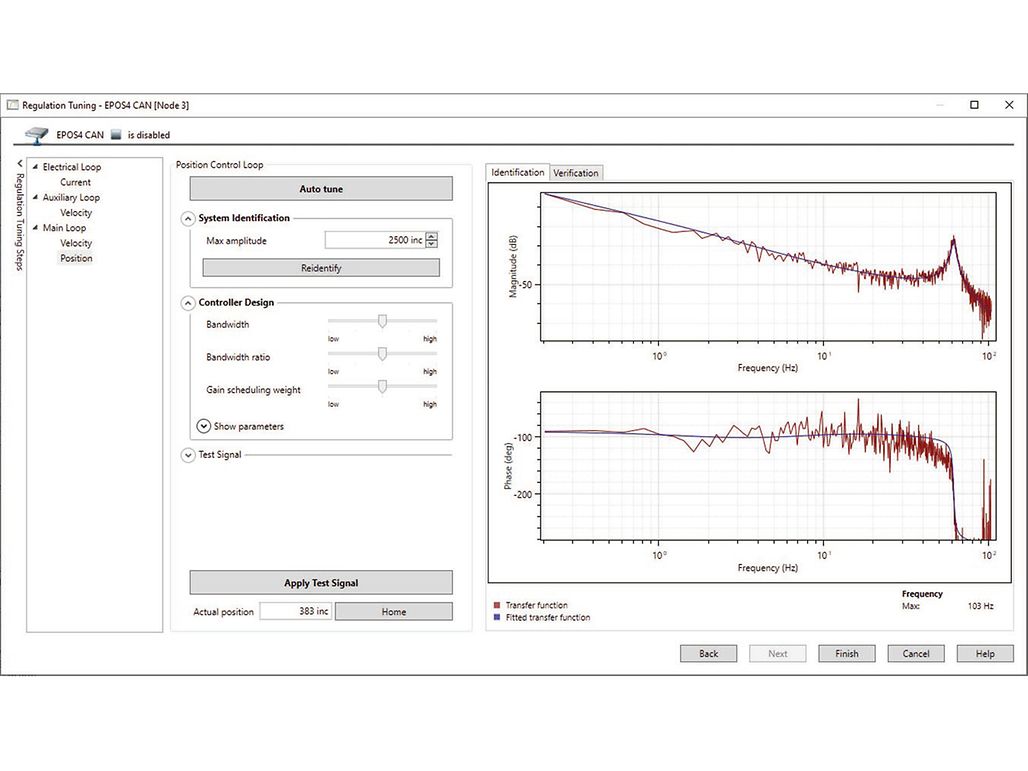
EPOS Studio: 이중 루프 제어 튜닝.
초소형이지만, 강력함
EPOS Micro는 -30°C ~ 45°C의 주변 온도 조건에서 추가 냉각 없이 설치 크기 1제곱센티미터당 피크 전력 50W 이상의 전력 밀도를 제공합니다. 실제로, 이는 32 × 22mm(“EPOS 24/5 Micro CAN”)에 불과한 설치 영역과 7mm의 두께를 필요로 하는 출력단과 컨트롤러와 함께 10초 동안 120W의 연속 출력과 360W의 피크 전력을 의미합니다.
초소형, 시운전 중에도
직관적인 EPOS Studio 시운전 소프트웨어에는 기본 구성으로 사용자를 안내하고 복잡한 이중 루프 컨트롤러 구조에도 모든 컨트롤러 매개변수의 자동 튜닝을 제공하는 시작 마법사가 포함되어 있습니다.
단순한 제품 그 이상: 시스템 파트너로서의 맥슨
맥슨은 지원 포털 support.maxongroup.com 과 다양한 서비스를 통해 단순한 카탈로그 제품 이상의 것을 제공합니다. 고객별 전자 보드에 EPOS4 Micro를 통합하기 위해 맥슨을 개발 및 생산 파트너로도 적용할 수 있습니다. 이러한 경우, 맥슨은 제품 공급업체일 뿐만 아니라 드라이브 기술 분야의 유능한 엔지니어링 파트너로서 전체 시스템에 대한 책임을 맡고 있습니다. 맥슨과의 협력을 통한 조기 정보 교환 및 아이디어 발굴은 기술 및 상업적 관점에서 최적의 솔루션을 향한 첫 걸음입니다.
간단히 말해서:
유능하고 목표지향적 – EPOS4 Micro와 맥슨의 서비스는 성공의 동력입니다.