Expert Blog
MiniMACS6, 후루타 진자의 안정화


엔지니어링에서 고전적인 문제 중 하나는 회전 역진자입니다. 이 진자는 제어 및 전기 공학과 기계 공학에서 움직임 패턴과 제어 알고리즘을 시연하고 검사하는 데 사용됩니다. 그리고 로봇 및 기타 기계를 제어하는 데 도움이 됩니다.
일본의 발명가, 후루타 카츠히사(Katsuhisa Furuta)의 이름을 딴 이 진자는 단순한 구조를 가지고 있습니다. 구동된 암은 수평면에서 회전하고 그 암에 부착된 진자는 수직면에서 회전합니다. 이론적인 모델링과 이러한 움직임의 안정화에 대한 필요성은 오랫동안 엔지니어들의 머리를 괴롭혔던 문제입니다. 후루타 진자에는 두 가지 변수가 있습니다. 제어 가능한 회전 조인트와 진자의 방향입니다. 진자는 불안정한 수직 위치에서 제어되며, 이때 암은 임의의 위치에 있습니다. 이 진자는 비선형의 불안정한 시스템이기 때문에 실험 수행, 기존 제어 알고리즘 테스트 및 새로운 계산 방법 개발에 적합합니다. 그리고 로봇 공학, 제어 이론 및 컴퓨터 기반 제어와 같은 연구 분야의 접근 방식을 결합하는 경우가 흔합니다.
올바른 컨트롤러 찾기
적합한 컨트롤러는 다양한 설계 전략을 사용하여 개발할 수 있습니다. 역진자에 적합한 컨트롤러 구조에는 PID, LQR, 퍼지 또는 자가학습 신경 컨트롤러가 포함됩니다. 다중 자유도를 가진 물리적 시스템을 수학적으로 모델링할 수 있습니다. 휴지 위치(제로 위치)에서 진자의 스윙업을 위해서는 에너지 접근과 같은 비선형 접근이 필요합니다. 그런 다음 수학적 설명을 통해 적합한 컨트롤러를 설계합니다. 이 컨트롤러는 실시간 지원 시스템에 대해 근사화하거나 이산화하여 MiniMACS6-AMP4와 같은 컨트롤러로 전송할 수 있습니다.
컴팩트형 컨트롤러
맥슨 MiniMACS6-AMP4는 출력단이 통합된 프로그래밍이 가능한 마스터 컨트롤러입니다. 이 컨트롤러는 회전 역진자용 안정화 컨트롤러입니다. 이 컨트롤러를 통해 예를 들어, 회전하는 마스터 축과의 저크가 없는 동기화를 위해 간단한 명령으로 복잡한 움직임 패턴을 실행할 수 있습니다. MiniMACS6-AMP4 다축 컨트롤러의 이점:
- 마스터 기능을 담당하므로 더 높은 수준의 컨트롤러는 필요하지 않음
- 라이선스가 필요하지 않은 동작 제어 기능 포함
- 출력단이 통합된 컴팩트형 드라이브 솔루션
라이선스가 필요하지 않은 자동화 소프트웨어 ApossIDE(통합 개발 환경)를 사용하여 간단한 명령으로 위치제어 및 동기화 작업을 설정하거나, C(ApossC)를 사용하여 자체 제어 알고리즘을 실행할 수 있습니다.
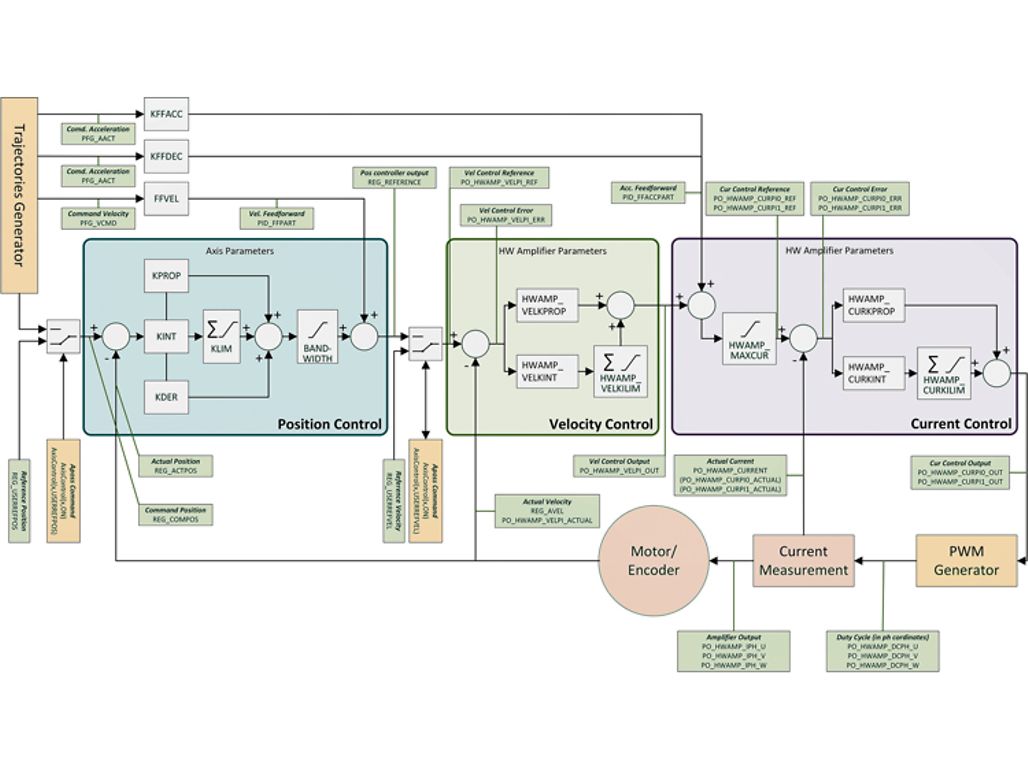
캐스케이드 제어 - MiniMACS6-AMP4와 같은 맥슨 동작 컨트롤러를 사용한 캐스케이드 제어의 예. 프로그래밍 기능과 통합 경로 계획은 더 높은 수준의 컨트롤러가 절대적으로 필요하지 않다는 것을 의미합니다.
작동 중: MiniMACS6-AMP4는 회전 역진자를 안정화합니다.
COMPACT MiniMACS6-AMP4 다축 컨트롤러
출력단이 통합된 프로그래밍이 가능한 다축 컨트롤러는 회전 역진자를 안정화하는 컨트롤러이며 회전 축과의 저크가 없는 동기화를 보장합니다.
최신호
드라이브 기술의 모든 측면에 대한 흥미진진한 이야기, 놀라운 사실 및 흥미로운 기술 관련 기사를 게재하는 맥슨의 잡지 Driven의 최신호를 읽어 보십시오. 다음 사이트에서 확인할 수 있습니다: maxongroup.com/driven
