Young Engineers Program
비행 로봇의 궤도를 개척하다

취리히 ETH의 집중 프로젝트의 일부로, 8명의 학사 과정 학생들이 어떤 방향으로든 움직이고 물체를 잡을 수 있는 비행 조종기를 제작했습니다. 드론은 쿼드로콥터보다 훨씬 더 기동성이 뛰어나며 비행 로봇을 새로운 차원으로 끌어올리는 것을 목표로 설계되었습니다.
포장된 화물을 운반하는 비행 로봇이 있는 창고. 많은 발명가들이 쿼드로콥터에 직렬 그리퍼 암을 장착하여 내부물류 자동화라는 미래의 비전을 현실화 하려고 시도했습니다. 그러나 이러한 드론과 암의 조합은 느리고, 돌출된 암은 무게를 잘못 분배하여 정밀도와 부하 용량에 영향을 끼칩니다. 또한 쿼드로콥터는 수평면에서만 회전할 수 있습니다. 즉, 소위 엔드 이펙터(이 경우, 그리퍼)가 모든 방향으로 움직일 수 없습니다. 당분간 대부분의 드론은 현재 여전히 검사 작업으로 제한되어 있습니다.
지난 가을, 취리히 ETH의 기계공학부 및 공정공학부의 학사 과정 학생 팀은 이러한 단점이 없는 통합된 비행 로봇을 개발하기 위한 아이디어를 얻었습니다. 이 젊은 엔지니어들은 ASL(Autonomous Systems Lab)이 제공한 집중 프로젝트에 도전하여 전방향 비행 조종기, 즉 주변 환경과 물리적으로 상호 작용할 수 있는 장치를 제작했습니다.

3D 프린터에서 받은 영감
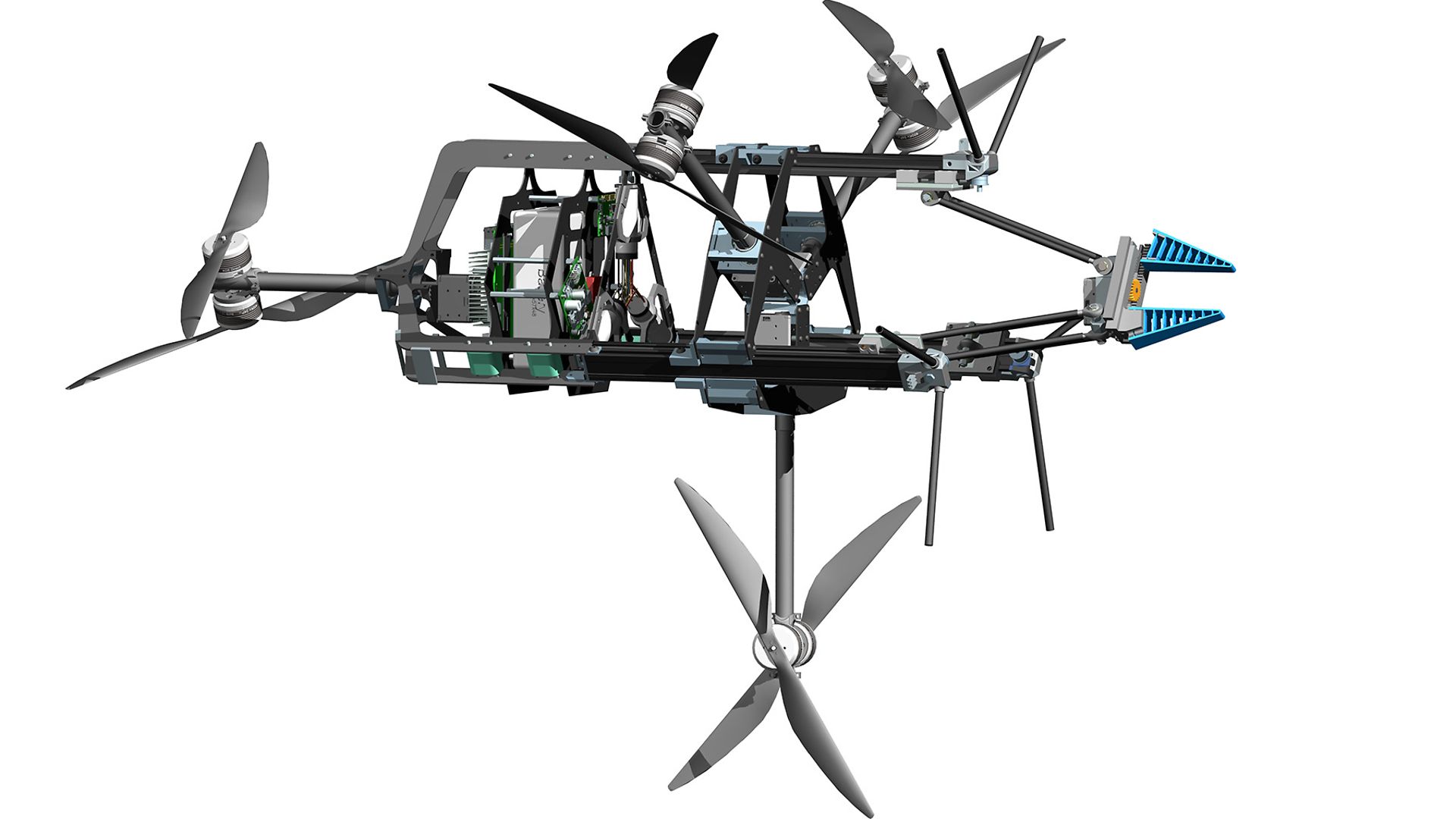
이 학생들은 고정밀 엔드 이펙터를 제작하기 위해 프리즘 구조 내에서 움직이는 3개의 슬라이드를 사용하여 배치된 선형 병렬식 암을 설치했습니다. 이 젊은 혁신가들은 Prismav(Prism Micro Aerial Vehicle)에 서로 다른 방향으로 정렬된 4개의 드라이브를 장착했으며 각 드라이브는 반대 방향으로 회전하는 2개의 프로펠러로 구성되었습니다. 이로 인해 개별 프로펠러의 모멘트가 균형을 이루고 비행 동작은 안정적입니다.
델타 암에 대한 영감은 3D 프린터 내부에서 나왔습니다. 기계공학부 학생인 마티아스 루비오(Matthias Rubio)는 다음과 같이 설명합니다. “저희는 3D 프린터 앞에서 프린터의 내부 구조를 사용하여 비행과 조작을 결합한 비행 플랫폼을 구축하는 아이디어를 얻었습니다." 이러한 종류의 델타 암은 비행 조종기에서 아직은 드문 형태이므로 새로운 접근 방식이라고 할 수 있습니다.
병렬식 암은 위치제어 오류를 보정합니다.
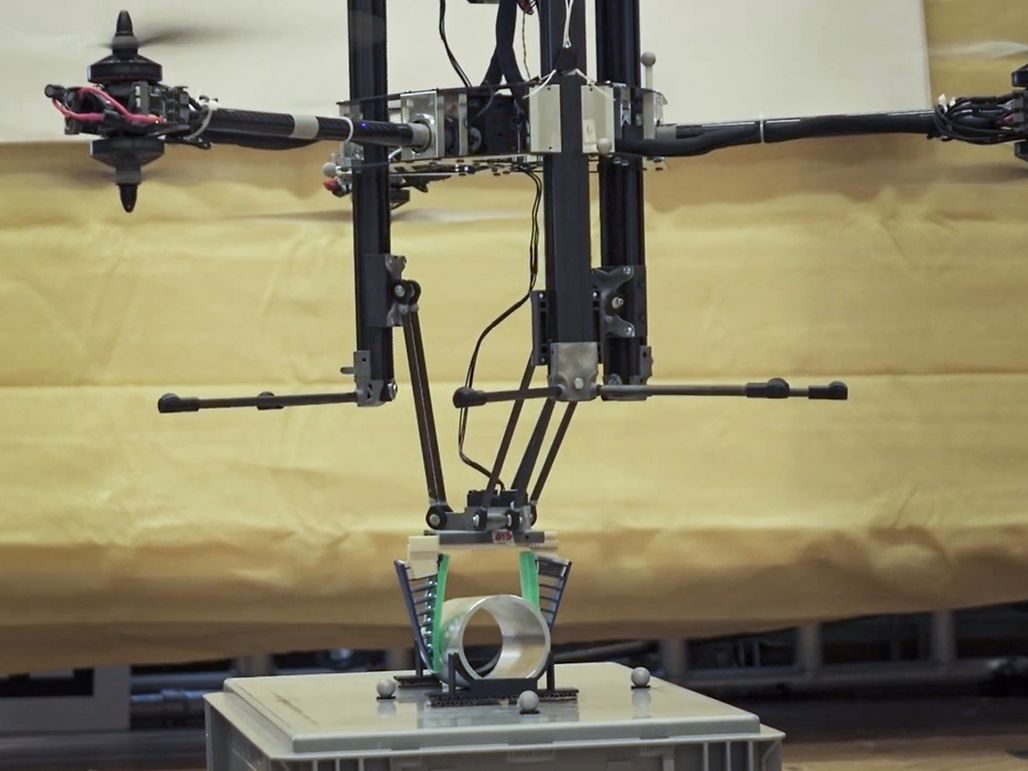
회전자 그룹은 자체 축을 중심으로 회전할 수 있습니다. 이로 인해 7.5kg의 비행 물체가 어느 방향에서든 계속 맴돌 수 있습니다. 집중 프로젝트 기간 동안, 전방위 드론은 시각적 동작 추적 시스템이 장착되어 있고 위치 및 정렬을 정밀하게 측정할 수 있는 실내에서 작동시켰습니다. 이렇게 하여 Prismav는 주변 환경과 상호 작용을 할 수 있고 그리퍼의 위치를 정밀하게 조절할 수 있습니다. 20,000mAh 용량의 배터리 2개로 약 12분 동안 비행할 수 있습니다.

그리핀 팀의 학생 8명(기계공학부 7명, 전기공학부 1명)이 500g의 실린더를 운반하는 비행에 성공한 후 환호하고 있습니다.
비행 조종의 부정확성은 일반적으로 10 ~ 15cm 범위 내입니다. 이를 보완하기 위해 3개의 브러시리스 맥슨 모터가 그리퍼 암의 위치를 정밀하게 제어합니다. 선형 가이드에서 움직이는 3개의 슬라이드는 모두 톱니 벨트를 통해 개별적으로 그 위치가 제어됩니다. 이 시스템을 사용하면 그리퍼가 표시된 3D 공간 내의 모든 위치에 도달할 수 있습니다. 팀은 성능저하 없이 무게를 줄이기 위해 컴팩트 ECX TORQUE 22 M 드라이브를 선택했습니다.
위험하거나 접근하기 어려운 지역의 경우
학생들은 Prismav를 통해 추가 연구를 위한 기반을 마련했습니다. 마티아스 루비오는 다음과 같이 덧붙입니다. “저희는 비행 조종기가 주변 환경과 상호 작용하며 500g의 실린더를 잡고, 운반하고, 내려놓는 기능을 시연했습니다." 핵심은 그리퍼 암이 드론의 움직임보다 더 빠르게 위치제어 오류를 보정한다는 것입니다.
2021년에 선보였던 집중 프로젝트는 큰 호응을 얻었습니다. 따라서 학생들은 이제 학사 과정 프로젝트의 일부로 Prismav를 계속 개발하고 있습니다. 그리고 자동화된 위치제어, 비행 경로 계산 및 제어 소프트웨어를 최적화하고 직관적인 컨트롤러를 통합하고 있습니다. 이는 애플리케이션의 잠재적 범위가 거대하므로 의미있는 작업입니다. 예를 들어, 비행 로봇은 스크루 조이기, 비계 설치, 고압선 수리 또는 눈사태 방지 구조물 건설과 같이 접근하기 어렵거나 위험한 장소에서 작업을 수행할 수 있습니다.