Expert Blog
EPOS4 - まさにマイクロ!

ロボット、分析および処理システムには、ネットワーク化された通信システムを備えたダイナミックなコントローラをコンパクトに統合した、エネルギー効率の高い多数のドライブが必要です。maxonはこの課題に意欲的に取り組み、これを可能にしています。
要件: コンパクトな多軸システムのコンセプト
手術用ロボット、医療用および実験用の分析装置、放射線技術のマルチリーフコリメータといった製品には、タイとにまとめて設置スペースに挿入できる、小型化されたドライブシステムが必要です。「ドライブパッケージ」には、電動モータのほかに、モータやセンサーの近くでデバイスに直接統合できる、コンパクトでネットワークに対応したモータコントローラも含まれます。
焦点: 小型化されたモータコントローラ
モータコントローラの最も重要な機能は、高いエネルギー効率とすべてのコンポーネントを省スペースにまとめた高い電力密度です。また、さまざまなセンサとアクチュエータの接続、および高速通信インターフェースも同様に重要です。「EPOS4 Micro」モジュールは、高度に標準化された機能、最新の制御アルゴリズム、コンパクトなパワーステージ (出力段)、CANopenまたはEtherCAT通信インターフェースを装備していますが、大きさはほんの切手サイズ (32 x 22 x 7 mm) です。デバイスメーカーは、このプラグインモジュールを必要な数の軸向けに自社の電子機器に統合することができます。これにより、超コンパクトなサイズでコストが最適化された多軸システムが実現します。
システム全体のバックボーンとしてのバスインターフェース
バスインターフェースを介して、各ドライブユニットはコマンドとアクセスデータをマスターコントローラ (PLCやmaxon MasterMACSなど) と高速サイクルで交換します。これに使用される一般的なフィールドバスシステムは、CANopenとEtherCATです。EtherCATは伝送速度が速いため、複雑な多軸アプリケーションにとっては特にメリットがあります。ただし、単軸として結合する場合は、追加のハードウェアと標準化された大型のRJ45コネクタが必要になるという欠点もあります。コントローラとコネクタのサイズは、ある程度の大きさの機械では問題になりませんが、小型機器やロボットでは、重要な選択基準になる可能性があります。
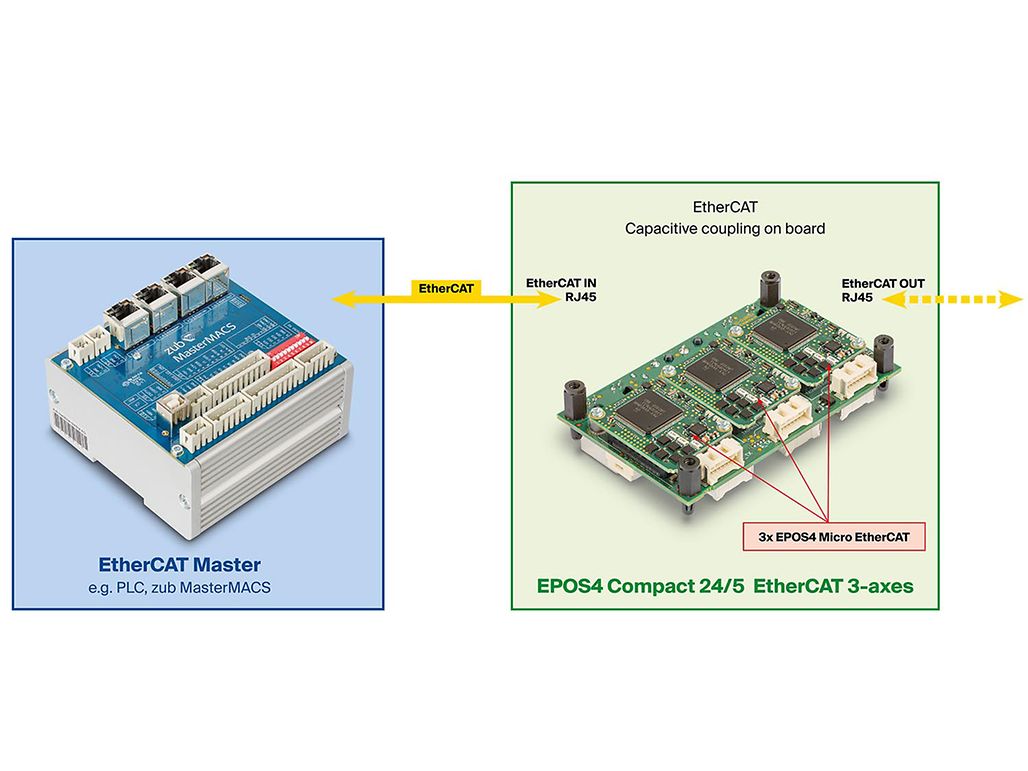
RJ45コネクタでの結合。3軸ボード上での内部容量性結合。
EtherCATを備えた「マイクロ」
EtherCAT通信では、誘導トランスデューサを活用して電位差によるDC信号成分を除去し、外乱を抑制し、シグナルインテグリティを確保します。しかしながら、こうしたコンポーネントやRJ45コネクタは、プリント回路基板上に多くのスペースを必要とします。また各ドライブコントローラごとに個別に統合する必要がある場合は、コストも吊り上がります。複数のEPOS4 Microユニットが同じ電子ボードに統合されている場合は、容量結合を使用して EtherCAT ポートを内部接続することも可能です。これは非常にコンパクトで、省コストのソリューションです。その場合、RJ45コネクタは、外部EtherCAT接続用にのみ必要となります。この原則に基づいて、maxonは、3つの「EPOS4 Micro 24/5 EtherCAT」モジュールを備えた、90 x 56 mmの取り付け面 (一般的な名刺のサイズ) という極めてコンパクトな多軸コントローラ を開発しました。
「マイクロ」サイズで統合も簡単に
CANopenまたはEtherCAT (選択した製品タイプに応じて) を介したEPOS4 Microのデータ交換やコマンド機能は、CiA®402プロトコル (「ドライブとモーションコントロールのデバイスプロファイル」) を利用しています。以下の標準化された運転モードをサポートしています: 「PPM – プロファイル位置制御モード」、「PVM – プロファイル速度制御モード」、「HM – ホーミングモード」、「CSP – サイクル同期位置制御」、「CSV – サイクル同期速度制御」、および「CST – サイクル同期トルク制御」。標準化されたモーションコントロールスレーブとして、「EPOS4 Micro」 (およびすべてのEPOS4製品) は、さまざまなPLCメーカーのシステムマネージャツールやモーションライブラリに非常に簡単に統合できます。maxonの「EPOS Command Library」を介して、PCまたはRaspberry Piからコマンドを実行するアプリケーションも可能です。
「マイクロ」でIIoTに対応
EPOS4は、マシンまたはドライブトレインのIIoT (Industrial Internet of Things、インダストリアルIoT) 環境における最下位レベルの情報サプライヤです。EPOS4バスインターフェースを介して、モータの電流とトルク、位置の値、エラー状態、コントローラとモータの温度と負荷の値、および外部センサーとアクチュエータの状態などにアクセスしたり、データを周期的に送信したりできます。
「マイクロ」でありながら多機能
「EPOS4 Micro」は、25 kHzの電流制御周波数と2.5 kHzの速度/位置制御周波数を備えており、サイクルレートはEPOS4製品ラインの他のすべてのバリエーションと同様です。フィールド指向制御 (FOC)、フィードフォワードおよびオブザーバー制御、ならびにデュアルループ制御といった最新のコントローラのコンセプトにより、「EPOS4 Micro」はモータ性能や動作精度を最大化することができるようになっています。モータシャフトにインクリメンタルエンコーダ、出力シャフトにSSIエンコーダを備えたデュアルループ制御により、固有の弾性やバックラッシュを伴うドライブトレインの場合でも、負荷側での正確な位置決めが可能になります。
「マイクロ」と性の多用途の両立
「EPOS4 Micro」は、ホールセンサ、デジタルインクリメンタルエンコーダ、およびSSIアブソリュートエンコーダを備えたブラシ付きおよびブラシレスDCモータをサポートします。合計5つのデジタル入力、3つのデジタル出力、2つのアナログ入力 (+/–10 V)、1つのアナログ出力 (+/- 4 V) により、リミットスイッチや原点スイッチなどの軸関連センサの接続と評価が可能です。
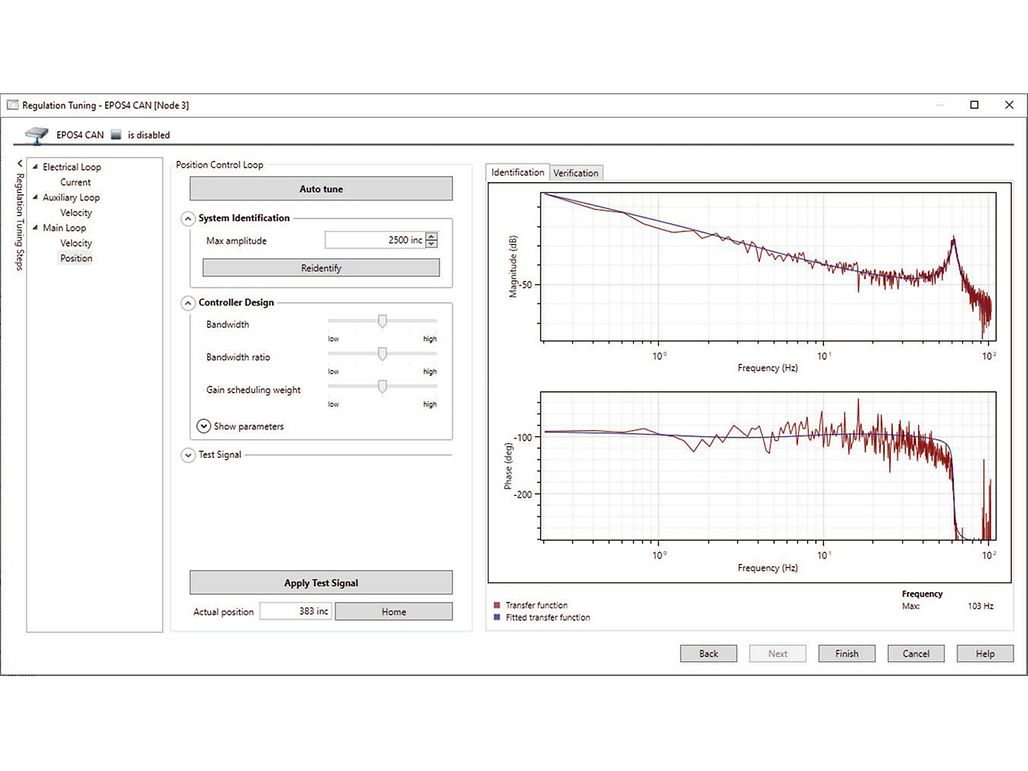
EPOS Studio: デュアルループ制御チューニング。
「マイクロ」、でもパワフル
「EPOS Micro」は、ヒートシンクや強制冷却なしで、取り付け面1 cm²あたり50 Wを超えるピークパフォーマンスの高電力密度を提供します。 これは実際には、出力段を含むコントローラの表面積がわずか32 x 22 mm (EPOS 24/5 Micro CAN) で厚さが7 mm、120 Wの連続出力電力と10秒間の360 Wのピーク電力となります。 これらはすべて、-30°C~45°Cの周囲温度 (追加冷却なし) で実現可能です。
コミッショニングでも「マイクロ」
直感的なコミッショニング用ソフトウェアEPOS Studioでは、基本設定ガイドや、複雑なデュアルループ制御の場合でもすべての制御パラメータを自動で調整するセットアップウィザードが含まれています。
製品だけではありません: システムパートナーとしてのmaxon
サポート ポータル support.maxongroup.com と多種多様なサービスにより、maxonは単なるカタログ製品以上のものを提供しています。カスタマイズされた電子基板にEPOS4 Microを統合するとき、maxonは開発・生産のパートナーとしても活躍します。ここでは、maxonは製品サプライヤーであるだけでなく、ドライブテクノロジーの分野における有能なエンジニアリングパートナーとして、システム全体に対する責任も負っています。初期の情報交換やmaxonとの連携によるアイデア探しは、技術面でも商業面でも理想的なソリューションを見出すための第一歩です。
一言で言えば:
有能で目標志向のEPOS4 Microとmaxonサービスが、成功を生み出します。