Young Engineers Program
敏捷な協働ロボット

カナダのラバル大学の研究者たちは、人間の敏捷性に匹敵する新型協働ロボットの開発に取り組んでいます。
協働ロボット (コボット) は、人であるユーザーが直接操作できるロボットアームで、複雑なプログラミングインターフェースを使用せずにタスクを学習させることができます。通常市販されている協働ロボットは、シリアルアーキテクチャに基づいて設計されています。これらの協働ロボットは減速比の高いアクチュエータを使用しているため、機械的バックドライバビリティがありません。また、ユーザーがロボットに加える力には、力/トルクセンサーを通じて反応する仕組みになっています。結果として、このようなロボットは人間の敏捷性を再現できず、人間が誘導するタスクではどうしても動きが不自然です。
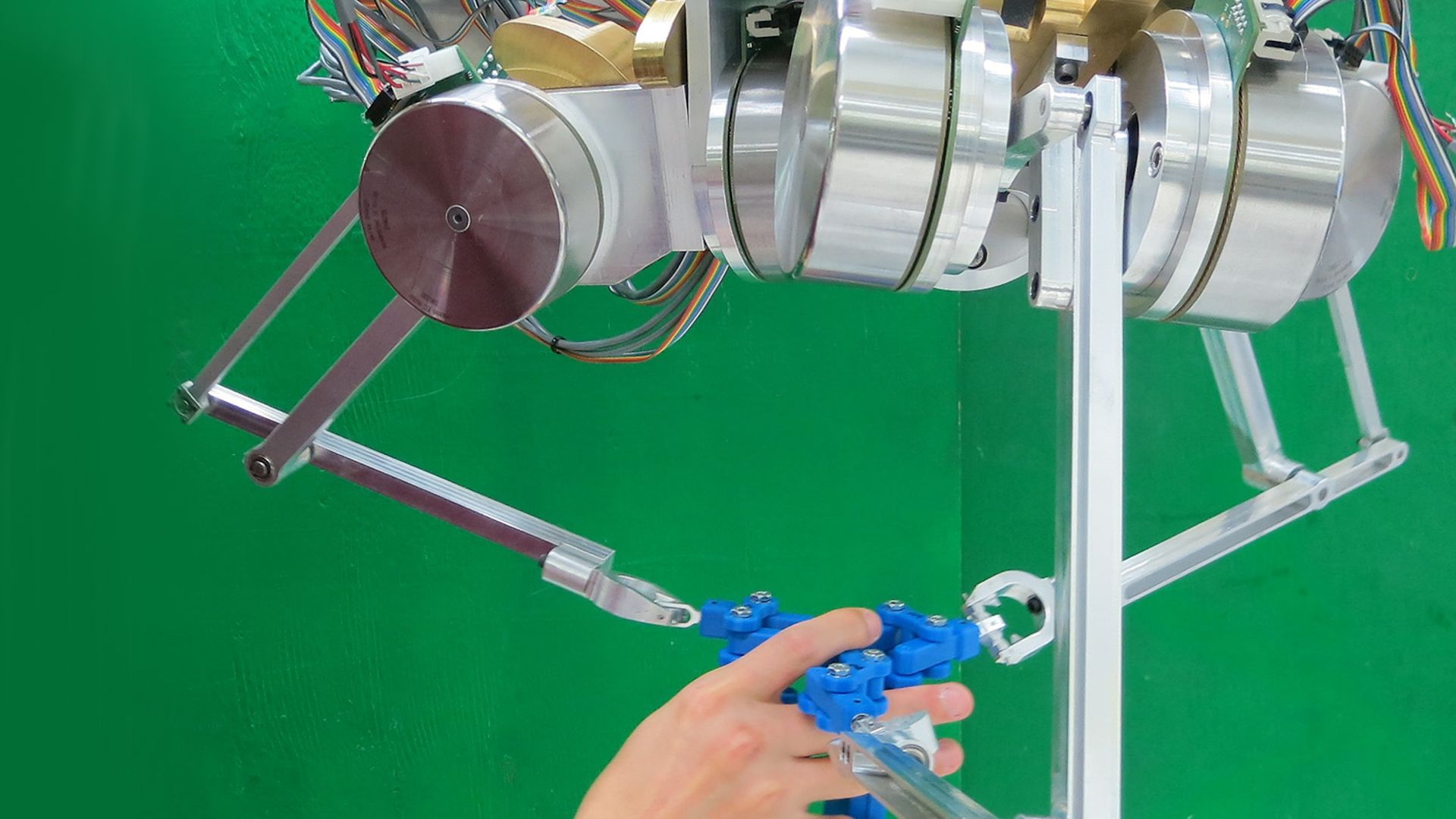
ラバル大学の研究者たちが採用しているアプローチは、これとは一味違っています。彼らは並列アーキテクチャに基づく協働ロボットを導入することで移動慣性を大幅に低減し、ベース上またはベースの近くにアクチュエータを配置することを可能にしています。ダイレクトドライブアクチュエータを使用することで、ロボットの機械的バックドライバビリティが実現し、よって力/トルクセンサーは不要になっています。また、ギアヘッドなしでも十分なトルクを確保するために、高トルクの EC 90 flat モータが採用されています。アクチュエータの静的トルクを低減するため、ロボットの脚部にはカウンターウエイトが内蔵されています。ロボットの機械的バックドライバビリティにより、人とロボットの物理的相互作用が、スムーズかつ直感的に実現します。さらに、非常にシンプルで効果的なコントローラを使用できます。このロボットのアーキテクチャによるさらなるメリットは、ベースアクチュエータからグリッパを操作できることです。バックドライバビリティ、低い移動慣性、およびダイレクト駆動伝送の技術により、人の腕に匹敵する敏捷性をものにしています。そのため、下の動画でご紹介しているように、これらのロボットはスムーズかつ直感的、かつ敏捷な、高帯域幅での人とロボットのインタラクションに最適なものとなっています。