Commande
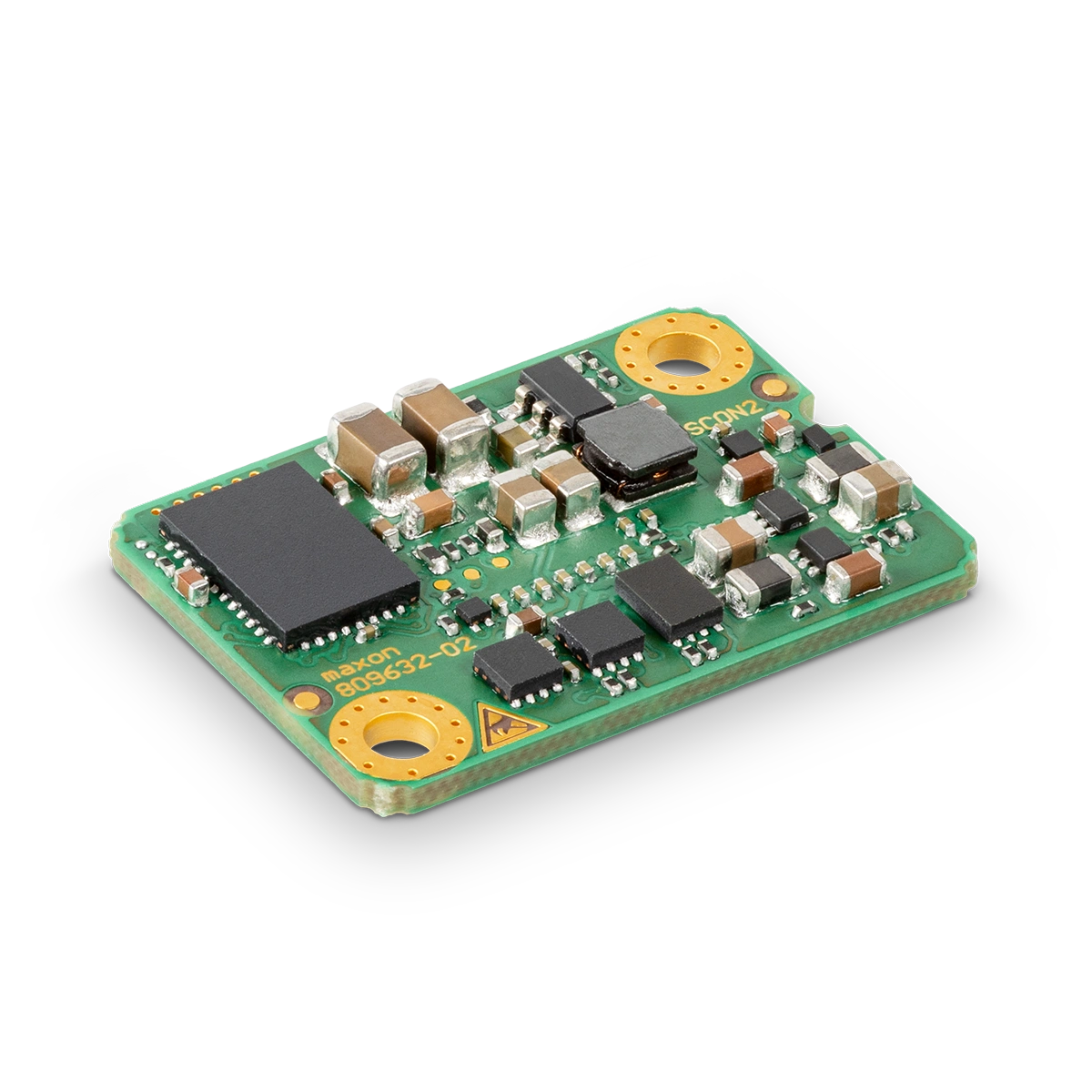
Servo contrôleur ESCON2 Nano 24/2
809635 – paramétrable, 5–24 VDC, 2 A
Prix par article108.90 CHF
Des questions sur la livraison ?
Servo contrôleur ESCON2 Nano 24/2
Moteur
- Moteurs DC jusqu'à
- 48.0 W
- Moteurs EC jusqu'à
- 48.0 W
Capteur
- Sans capteur (moteurs DC)
- ja
- Codeur incrémental digital (2 canaux, single ended)
- ja
- Capteurs à effet Hall digitaux (moteurs EC)
- ja
Modes de fonctionnement
- Régulateur de courant
- Oui (couple)
- Régulateur de vitesse
- ja
Caractéristiques électriques
- Tension de service Vcc (min.)
- 5 V
- Tension de service Vcc (max.)
- 24 V
- Tension de sortie max. (facteur * Vcc)
- 0.9
- Courant de sortie max. Imax
- 6 A
- Durée max. du courant de sortie max. Imax
- 6.5 s
- Courant de sortie permanent Icont
- 2 A
- Fréquence d'horloge de l'étage de sortie
- 50.0 kHz
- Fréquence d'échantillonnage du régulateur de courant PI
- 50.0 kHz
- Fréquence d'échantillonnage du régulateur de vitesse PI
- 10.0 kHz
- Rendement max.
- 93.0 %
- Vitesse max. (moteurs DC)
- 120000.0 rpm
- Vitesse max. (1 paire de pôles) commutation sinusoïdale
- 120000.0 rpm
Entrées
- Signaux capteurs à effet Hall
- H1, H2, H3
- Signaux du codeur
- A, B
- Fréquence d'entrée max. du codeur
- 6.2 MHz
- Signaux de capteur
- Clock, Data
- Entrées digitales
- 8.0
- Fonctionalités des entrées digitales
- Sens de rotation, Drive enable, General purpose, fin de course, consigne PWM, offset de consigne PWM, Quick stop, commutation 4 valeurs de consigne fixes
- Entrées analogiques
- 2.0
- Résolution, plage, circuit
- 12-bit, 0…+5V, referenced to Ground
- Fonctionalités des entrées analogiques
- Consigne analogique, offset de consigne analogique, valeur fixe (General purpose)
Sorties
- Sorties digitales
- 3.0
- Fonctionalités des sorties digitales
- fault, limitation, hall sensor commutation frequency, hall sensor rotation frequency
- Sorties analogiques
- 2.0
- Résolution, plage
- 12-bit, 0…+3.3V, referenced to Ground
- Fonctionalités des sorties analogiques
- current monitor, temperature monitor, velocity monitor, fixed value (general purpose)
Sorties de tension
- Tension d'alimentation des capteurs à effet Hall
- see "Sensor supply voltage"
- Tension d'alimentation du codeur
- see "Sensor supply voltage"
- Tension d'alimentation de capteur
- +5 VDC, max. 145 mA
- Tension de sortie auxiliaire
- +3.3 VDC, max. 20 mA
Interfaces
- USB 2.0 (pleine vitesse)
- Yes
- Fonction gateway RS232 vers CAN
- Coming soon
- Fonction gateway USB vers CAN
- Coming soon
Fonction de protection
- Fonctions de protection
- current limit, overcurrent, short-circuit of motor winding, excess temperature motor, excess temperature controller, overvoltage, undervoltage, voltage transients, velocity limit, loss of feedback signal, system monitor, error & warning behavior management
Conditions ambiantes
- Température - Service (min.)
- -30.0 °C
- Température - Service (max.)
- 45.0 °C
- Température - Plage étendue
- +45…70 °C (for derating refer to <
>) - Température - Stockage (min.)
- -40.0 °C
- Température - Stockage (max.)
- 85.0 °C
- Humidité atmosphérique (non condensante) (min.)
- 5.0 %
- Humidité atmosphérique (non condensante) (max.)
- 90.0 %
Données mécaniques
- Poids
- 2.5 g
- Dimension (longueur)
- 23.0 mm
- Dimension (largeur)
- 16.0 mm
- Dimension (hauteur)
- 5.0 mm
- Fixation
- Plugs into socket with 0.4 mm pitch, mounting holes for M2 screws
Logiciel
- Programme d'installation
- Motion Installer
- Interface graphique utilisateur
- Motion Studio
- Système d'exploitation
- Windows 11, 10
- DLL Windows pour PC
- Coming soon
- PC master
- Exemples de programmation
- Linux Shared Object Library
- Coming soon
- CAN Interfaces
- Exemple de programmation
Fonctions
- CANopen Profile Velocity Mode
- ja
- CANopen Cyclic Synchronuous Velocity
- ja
- CANopen Cyclic Synchronuous Torque
- ja
- Mode vitesse
- ja
- Mode courant
- ja
- Valeur de consigne analogique
- ja
- Velocity Control Feed Forward
- ja
- Quickstop
- ja
- Activation
- ja
- Réglage automatique avancé du régulateur
- ja
Avez-vous des questions techniques ?
Description
L’ESCON2 Nano 24/2 est un module servo-contrôleur OEM dynamique à 4 quadrants destiné à être intégré dans les systèmes des clients. Il est adapté au pilotage efficace de moteurs DC avec balais et de moteurs EC sans balais (BLDC) équipés de capteurs à effet Hall et/ou de codeurs de puissance pouvant atteindre 48 W / 144 W.