Expert Blog
Por qué la industria necesita nuevos controladores de posicionamiento
Biren Patel, ingeniero de ventas de maxon motor, habla acerca de la nueva generación de controladores de posicionamiento EPOS4 de la empresa.
Este es un controlador de motor DC con dos diferentes potencias nominales y una placa de conexiones para una rápida integración en la maquinaria. Los controladores de posición son adecuados para el control dinámico de motores DC con escobillas y sin escobillas con una potencia continua de hasta 750 W y una potencia pico de 1500 W.
Un par de cosas nos llevaron a desarrollar el nuevo Easy-to-use Positioning System (EPOS), o sistema de posicionamiento fácil de usar. Estamos orgullosos de mantenernos al día con la tecnología y de innovar continuamente. Este controlador de posicionamiento es entre dos y dos veces y media más rápido que nuestros controladores EPOS2. No va a sustituir a estos controladores, sino a complementarlos.
Puede ocurrir que los ingenieros tengan una aplicación que no requiera un control de posicionamiento sofisticado, sino uno rápido. El controlador EPOS4 de maxon motor entra en juego para abordar aplicaciones que necesitan un término medio entre un control de alta gama y los sistemas de baja gama basados en Digital Signal Processor (DSP).
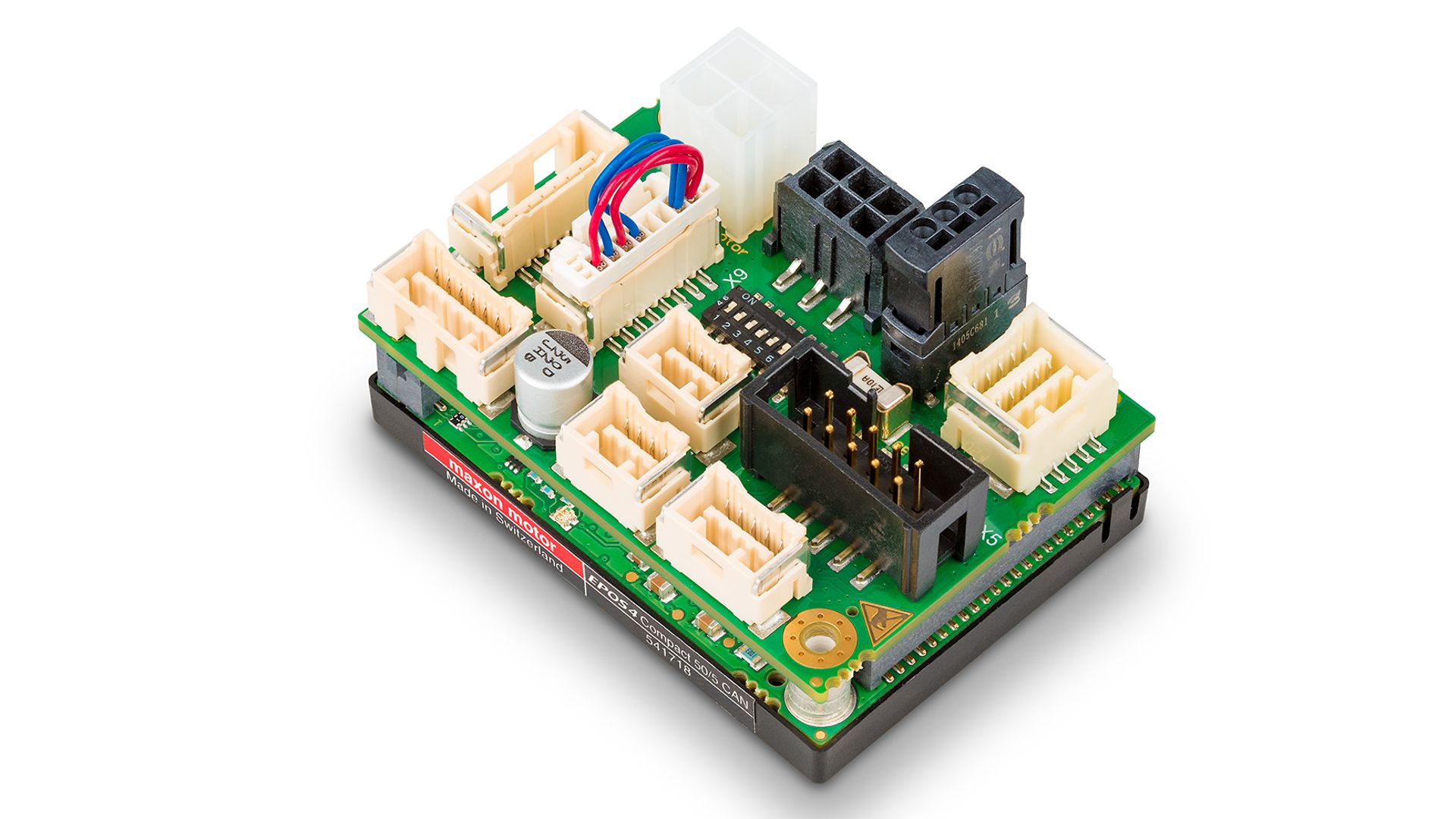
A lo largo de los años, los clientes nos pedían controladores más compactos y con una mayor densidad de potencia. Este es otro de los motivo que nos llevó a desarrollar el EPOS4. Los conectores macho del controlador son parte de la placa principal, por lo que están fijos. Lo que puede desmontarse es una placa compacta instalada encima de la placa principal, lo que permite una fácil configuración y una rápida puesta en marcha de aplicaciones puntuales.
Controladores de posicionamiento EPOS para conexiones rápidas
Piénselo: si un ingeniero está realizando un análisis de viabilidad o una prueba de concepto, un diseño tradicional de controlador le obligaría a abrir el dispositivo y soldar los pines directamente, arriesgándose a cortocircuitar otros pines o a dañar la propia placa.
Por el contrario, nuestro EPOS4 puede incorporar una placa compacta que los ingenieros pueden comprar y colocar en el EPOS4. Esto les permite usar los conectores que allí se encuentran para conectar diferentes tipos de motores, fuentes de alimentación y otros componentes motores para completar las pruebas de viabilidad.
De hecho, el diseño modular también se extiende a otra característica del controlador. Hemos añadido un disipador de calor opcional para incrementar la capacidad de la placa del controlador. También recomendamos utilizar disipadores de calor adicionales para obtener una mayor capacidad de corriente a altas temperaturas.
La placa del modelo base sin disipador de calor tiene una salida de 8 A. Con el disipador de calor podemos alcanzar una salida continua de 15 A. Añadiendo un disipador de calor adicional, el controlador puede proporcionar 15 A incluso en entornos que superan los 70 o 75 °C, bajo carga total.
Los controladores EPOS2 y EPOS4 tienen buses de comunicación R232 USB y CANopen. El EPOS4 también incluirá una opción para la comunicación EtherCAT. La comunicación USB con el EPOS2 y EPOS4 se utiliza normalmente para el mantenimiento y la interfaz del proceso. Contamos con un controlador de alta gama llamado MAXPOS (para posicionamiento) que solo dispone de conectividad EtherCAT.
De hecho, el controlador es un verdadero dispositivo esclavo EtherCAT y creemos que es una función importante porque todo el mundo se está pasando a Ethernet. Mi opinión personal sobre este tema es que hay una gran tendencia a elegir EtherCAT porque todo el mundo desea poder mencionar en su marketing la capacidad de conectividad EtherCAT, incluso más allá de las ventajas de este estándar en el mundo real. Este es el motivo por el que incluimos la conectividad EtherCAT en el EPOS4.
Ofrecemos el software EPOS Studio (sin coste alguno) para que los ingenieros puedan realizar más configuraciones, pruebas de concepto y análisis de viabilidad. El software también incluye un registrador de datos que es fácil de usar e incorpora una sencilla función de alcance. Hay cuatro canales que los ingenieros pueden utilizar para monitorizar aspectos como la posición y comparar el comando con lo que el motor está haciendo realmente.
Los ingenieros también pueden usar el software para monitorizar la velocidad y el consumo de corriente, así como para comprobar su trabajo. Un ingeniero puede, por ejemplo, diseñar un sistema de movimiento lineal basado en un tornillo de potencia y, a continuación, aplicar el software EPOS Studio para garantizar que no se consuma más que una determinada corriente, o para garantizar que pueda suministrar un par definido.
El software EPOS Studio puede leer todos estos valores y compararlos. Es muy práctico para configurar el motor, entre muchas otras opciones. Los usuarios pueden introducir movimientos sencillos y registrar todos los datos relacionados con la salida de movimiento para hacerse una idea mejor de cómo está funcionando su sistema. Para obtener más información, haga clic aquí: