Expert Blog
Motores DC como generadores


Los motores DC con escobillas y sin escobillas pueden funcionar como generadores. Sin embargo, es necesario tener en cuenta algunos aspectos importantes a la hora de diseñar el motor.
De vez en cuando me preguntan si los motores DC de maxon pueden utilizarse como generadores. Nuestros motores son muy eficientes, lo que también se aplica cuando se utilizan como generadores. Los cálculos básicos entre velocidad y tensión, así como corriente y par, son muy sencillos. A continuación se ofrecen algunas reglas para una buena elección.
¿Tensión de DC o CA?
Regla número 1: para generar tensión de DC debe elegirse un motor DC con escobillas o un motor EC (BLDC) sin escobillas con rectificador de tensión. Para generar tensión de CA debe seleccionarse un motor EC sin escobillas y conectar solo dos fases. Los motores sin escobillas no necesitan sensores Hall.
Constante de velocidad kn
Muchos generadores funcionan a una velocidad de 1000 r/min o inferior. Esta es una velocidad bastante baja para motores pequeños. Para generar 10 V o más a 1000 rpm se requiere una constante de velocidad de 100 rpm/V o menos. Tales bobinados son difíciles de encontrar en la gama de maxon. Solo hay unos pocos bobinados de alta resistencia en motores de mayor tamaño capaces de satisfacer este requisito. Los motores más pequeños tienen constantes de velocidad más elevadas.
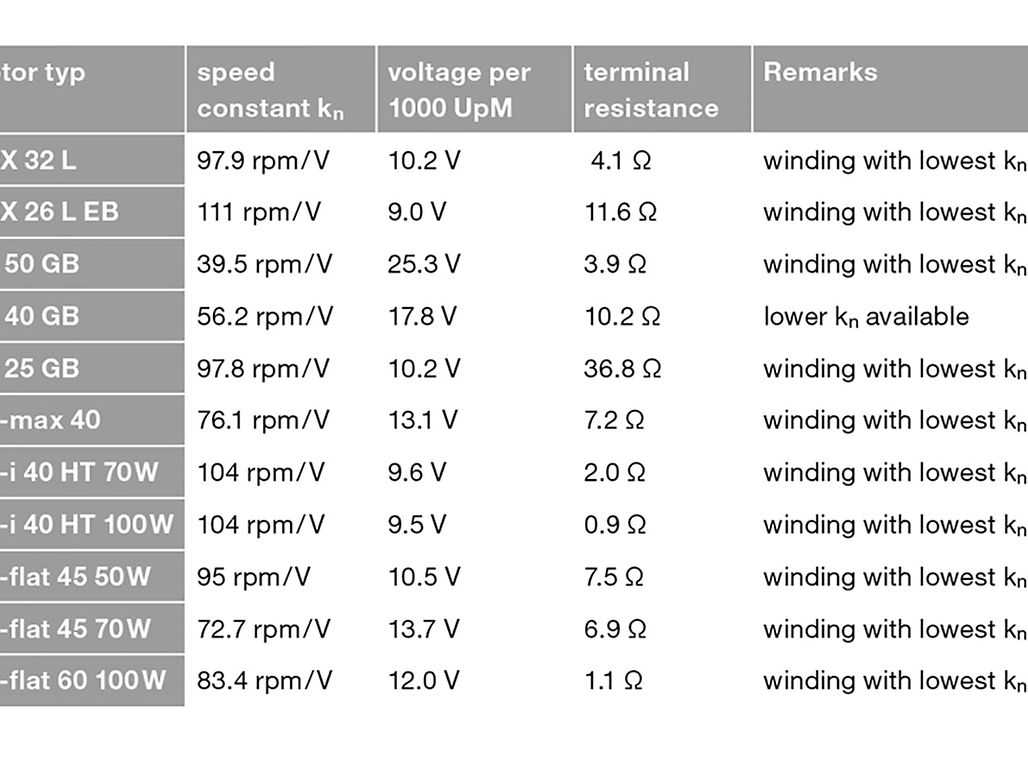
La tabla 1 muestra una selección de motores con constante de velocidad baja (o constante de generador elevada = tensión generada por velocidad). Normalmente, solo el bobinado de motor con la resistencia más alta tiene como resultado una constante de velocidad menor que 100 rpm/V.
Regla número 2: sin tener en cuenta la carga, el bobinado debería tener una constante de velocidad de kn < n/u o menor. Como alternativa, la velocidad del motor puede incrementarse utilizando un reductor (véase más abajo).
Resistencia
La regla número 2 requiere motores con una constante de generador elevada. Desafortunadamente, estos bobinados también presentan la máxima resistencia. Una alta resistencia reduce la tensión de salida bajo carga y la tensión de salida se vuelve muy sensible a la corriente de carga.
Regla número 3: para una obtener una tensión de salida estable en un determinado rango de carga, es preferible seleccionar un motor más grande en el que la resistencia sea menor incluso en motores con una constante de generador elevada.
Los motores EC-i 40 High Torque son muy interesantes en lo que a esto se refiere.
Restricciones de potencia
El motor/generador no debe seleccionarse únicamente teniendo en cuenta la potencia. Para satisfacer los requisitos de par, es posible que se necesite un motor con una potencia nominal mayor que la generada, sobre todo si la velocidad del generador es baja en comparación con las velocidades típicas del motor.
Limitaciones de par y velocidad
La cantidad de par en el generador define el tamaño y el tipo del motor/generador. Debe seleccionarse un tipo de motor con un par continuo mayor que el par del generador. Al calcular el par o la carga de corriente debe tenerse en cuenta el tipo de funcionamiento. ¿Desea que el generador funcione continuamente durante largos periodos, en ciclos intermitentes o solo durante intervalos cortos? En consecuencia, deberá elegir un tamaño de motor con suficiente par o corriente. También debe respetar la velocidad máxima del tipo de motor. Sin embargo, debido a que las velocidades son normalmente bajas, esto casi nunca es un problema.
Limitaciones de corriente y tensión
El bobinado más apropiado para un determinado tipo de motor se deriva de los requisitos de corriente y tensión generada. Debe seleccionarse un bobinado que pueda generar la tensión requerida U incluso bajo carga. Si partimos de una velocidad de generador fija n, necesitamos una tensión del bobinado Ut mayor que U.
Sin tener en cuenta la carga, debe seleccionarse una constante de velocidad de acuerdo con la regla número 2, es decir, un bobinado con una resistencia suficientemente elevada. Debido a que la capacidad de corriente disminuye cuando aumenta la resistencia, debe comprobarse que la corriente continua siga siendo lo suficientemente alta.
Ut = n/kn – Rmot · IL > U
El gráfico muestra claramente los efectos ambivalentes de diferentes bobinados.
- Cuanto más alta es la resistencia del bobinado, mayor es la tensión generada (sin carga).
- Sin embargo, cuanto mayor es la resistencia del bobinado, mayor es la reacción de la tensión generada ante los cambios de corriente de carga.
Estos efectos contradictorios pueden eliminarse hasta cierto punto seleccionando motores más grandes con resistencias más bajas para la misma constante de generador (de acuerdo con la regla número 3).
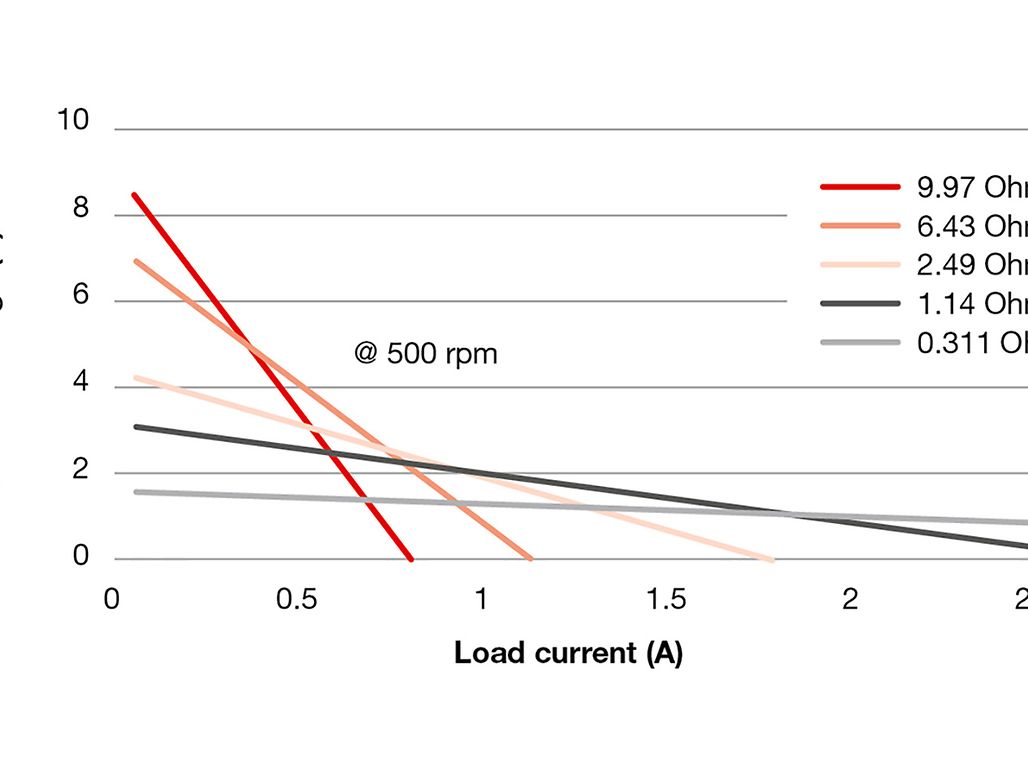
Líneas de tensión y corriente de los diferentes bobinados del RE 40 con escobillas de metales preciosos a 500 rpm. Observe las diferentes pendientes de cada bobinado.
Combinaciones de reductor y motor
Regla número 4: para incrementar velocidades muy bajas deben utilizarse reductores. Sin embargo, los reductores de maxon no son muy adecuados para el accionamiento por la salida. Deben utilizarse reductores que puedan accionarse hacia atrás, es decir, reductores planetarios de hasta dos etapas o reductores de engranajes rectos (o reductores con diseño especial).
La razón para usar combinaciones de reductor y motor es la baja velocidad del mecanismo impulsor de los generadores, accionados p. ej.mediante una turbina eólica o hidráulica, e incluso manualmente. Algunas observaciones y recomendaciones:
- En estos casos, los reductores deben accionarse en sentido inverso. Sin embargo, los reductores de maxon no están realmente diseñados para su funcionamiento inverso y la eficiencia es baja.
- Los reductores con una relación de reducción elevada (tres y más etapas) no pueden accionarse hacia atrás, es decir, no giran cuando se accionan por la salida con el par máximo admisible. Es posible utilizar reductores planetarios con una o dos etapas, ya que estos pueden accionarse por la salida.
- Es mejor utilizar reductores de engranajes rectos que reductores planetarios. Los reductores de engranajes rectos pueden accionarse más fácilmente hacia atrás y, normalmente, su eficiencia es mayor.
Caso especial: motor DC como tacómetro de DC
Regla número 5: para los tacómetros de DC deben utilizarse motores DC con escobillas de metales preciosos que sean más adecuados para corrientes pequeñas. El bobinado debe seleccionarse de acuerdo con la tensión de tacómetro requerida y el rango de velocidad en la aplicación. No es necesario preocuparse por la resistencia del bobinado. Basta con asegurarse de que haya una resistencia de carga de varios kΩ para mantener bajas las corrientes.