maxon Story
Exoesqueleto médico para la rehabilitación

El objetivo alcanzado era el de diseñar una terapia inteligente basada en datos para el tratamiento de enfermedades neurológicas y trastornos del movimiento musculoesquelético.
El objetivo principal de Harmonic Bionics era ayudar a los pacientes y profesionales de la salud diseñando una tecnología inteligente que permitiera crear un protocolo basado en datos para el tratamiento de enfermedades neurológicas y trastornos del movimiento musculoesquelético. Para ello, la empresa fue responsable del diseño y el montaje completos de su exoesqueleto bilateral de extremidades superiores Harmony SHR™.
Al permitir la intervención temprana, la repetición funcional y la terapia basada en la intención, el Harmony SHR proporciona a sus usuarios la capacidad de mejorar la eficiencia y la eficacia de la rehabilitación de las extremidades superiores. Como producto estrella de la empresa, el Harmony SHR está diseñado para ofrecer un valor único en tres áreas de la medicina: neurociencia e investigación científica del movimiento, evaluación de los trastornos del movimiento y rehabilitación. Para simplificar los trabajos de diseño del producto, Harmonic Bionics ha seleccionado componentes comerciales de serie (COTS, por sus siglas en inglés) para integrarlos en los diferentes actuadores robóticos de acuerdo con los requisitos de cada uno de ellos. La empresa tuvo que hacer pequeñas concesiones en la fase de diseño, a veces, por ejemplo entre el tamaño del actuador y la capacidad de carga/peso y entre el par máximo y la sensibilidad del par. El producto final tiene la fuerza necesaria para ofrecer asistencia para los ejercicios físicos sin resultar demasiado pesado o difícil de usar.
En las aplicaciones tradicionales de brazos robóticos, estos tienen que funcionar alejados de las personas para evitar lesiones durante los movimientos. La mayoría de los brazos robóticos del mercado no están diseñados para interactuar con los humanos de forma segura. No son capaces de detectar a una persona que se encuentre en su trayectoria o sortearla mientras se realiza la tarea programada. Es por ello por lo que los robots tradicionales pueden ser peligrosos para las personas que interactúan con ellos, especialmente en una aplicación de fisioterapia. Esto no es un problema con el Harmony SHR, que ha sido diseñado para ser sensible a la fuerza y para ser controlado mediante impulsos de fuerza ejercida por los usuarios, a diferencia de los puntos de ajuste posición típicos de la mayoría de los brazos robóticos.
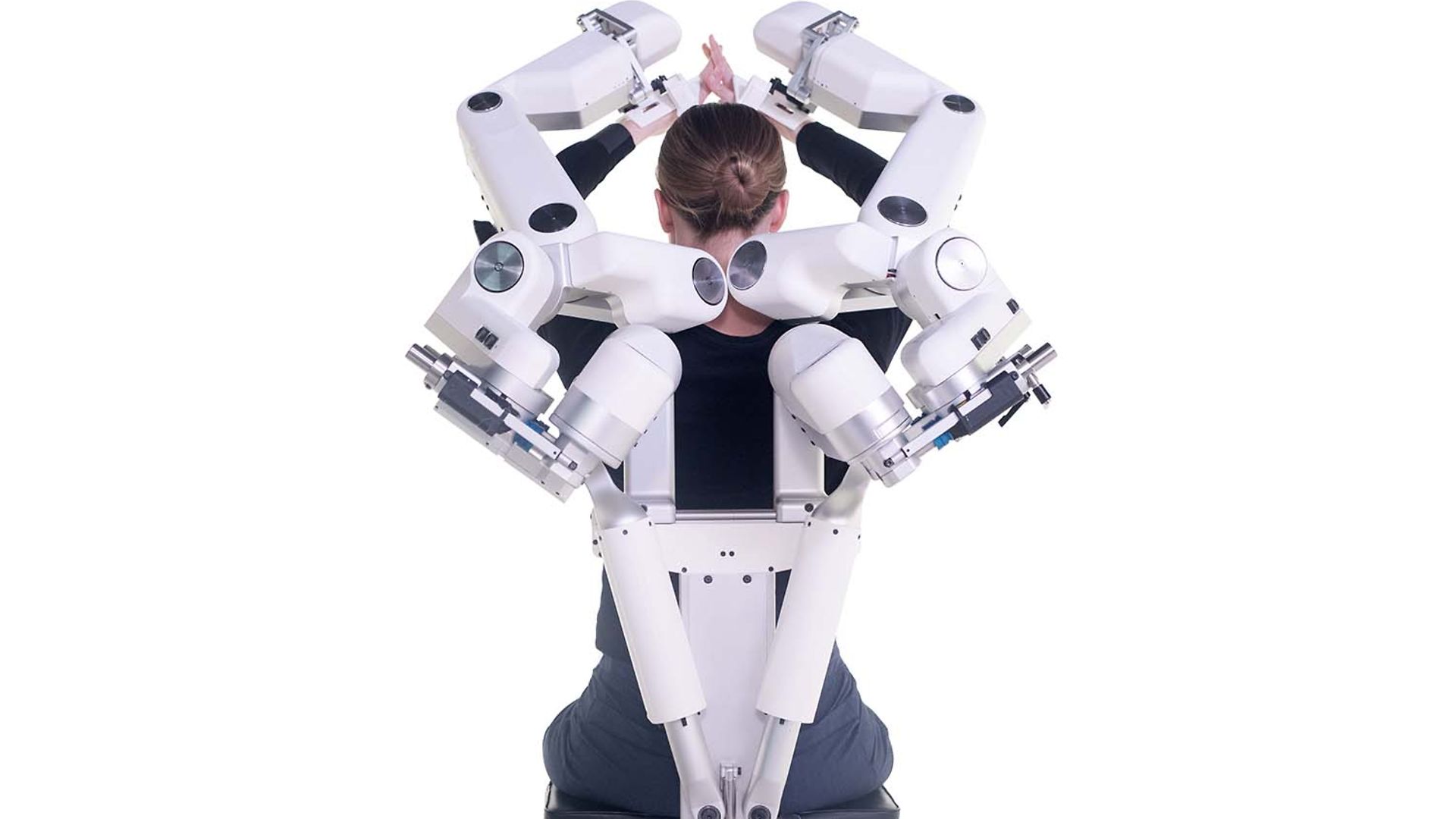
Imagen 1: la precisión es menos importante para la rehabilitación, especialmente durante los ejercicios.
Para ayudar a los pacientes con sus ejercicios, es mucho más importante que el robot aplique la fuerza exacta al paciente y no tanto su posicionamiento exacto (véase la imagen 1). El robot ha sido diseñado teniendo en cuenta todos los requisitos, por lo que incluso una fuerza mínima aplicada al robot puede provocar que este se aparte, reduzca la velocidad o se detenga completamente. Gracias a esta característica, es totalmente seguro que el exoesqueleto se mueva libremente.
Imagen 2: el controlador ESCON de maxon es un complemento compacto y potente del exoesqueleto Harmony SHR.
Esta sensibilidad a la fuerza exigía modificar el diseño de los típicos actuadores robóticos. Harmonic Bionics ha desarrollado un actuador robótico patentado que utiliza una célula de carga que está mecánicamente aislada de cualquier carga externa. El resultado es que cada célula de carga únicamente puede captar la fuerza ejercida por la articulación en la que está montada, sin la interferencia de fuerzas aplicadas a otras articulaciones, lo que aumenta su precisión. Los controladores ESCON fabricados por maxon tienen un tamaño compacto y son fáciles de integrar en el sistema eléctrico y mecánico (véase la imagen 2). Comprobamos que el software es muy fácil de usar. Los motores incluyen hojas de datos informativos que facilitan la integración. Pocas son las veces en la que replantearnos la selección del motor, ya que las hojas de datos nos ayudan a tomar la decisión correcta a la primera.
Los sistemas motores utilizados en el exoesqueleto Harmony SHR son actuadores giratorios con salida para la detección del par y el ángulo, que se usan como asistencia para el movimiento del paciente, o actuadores lineales con feedback de posición usados para adaptar el robot al paciente. El exoesqueleto está diseñado para proporcionar una evaluación objetiva de la capacidad de movimiento del paciente. El sistema tiene instalados más de 80 sensores que registran 2000 mediciones por segundo, lo que le permite medir con exactitud múltiples parámetros, como el rango de movimiento, la generación de fuerza y el número de repeticiones.
El sistema de movimiento usa varios motores diseñados y fabricados por maxon. maxon fue capaz de suministrar motores para satisfacer la amplia variedad de necesidades específicas del sistema. Por ejemplo, los motores EC flat proporcionaron el par de salida elevado necesario en un paquete compacto que cabe en el tamaño reducido del exoesqueleto (véase la imagen 3). Los motores planos pueden suministrarse también con sensores de ángulo.
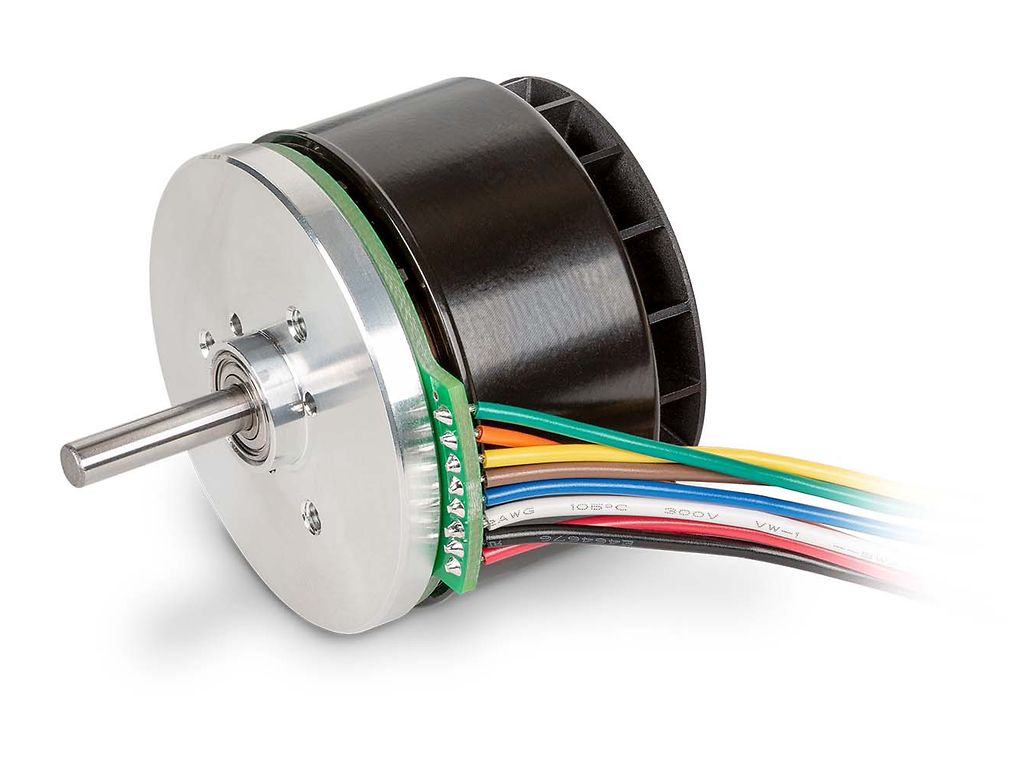
Imagen 3: el motor EC 60 plano de maxon proporciona un lato par en un paquete compacto.
El motor EC 60 Flat fue seleccionado porque su diámetro exterior es similar al del reductor armónico y porque es axialmente compacto. El eje del motor EC 60 Flat está unido a un generador de onda de un reductor armónico del tamaño 17, que se seleccionó por sus dimensiones axiales compactas y su gran capacidad de par. Los reductores armónicos ofrecían las características que la empresa necesitaba para el diseño: altas reducciones, poca holgura y alto par.
El estátor del motor de maxon está montado en el anillo circular (Circular Spline) del reductor armónico. El casquillo cilíndrico (Flexspline) del reductor armónico está unido a un eje de salida que se apoya sobre un rodamiento de rodillos cruzados, el cual soporta todas las cargas excepto la salida de par del actuador. Debido a que el rodamiento de rodillos cruzados soporta las demás las cargas, la única que actúa sobre el sensor de carga es la salida de par del sensor de carga.
El motor de maxon, el eje de salida y el conjunto del reductor armónico pueden girar libremente en el rodamiento de rodillos cruzados. El anillo circular del reductor armónico y el estátor del motor de maxon están unidos al mismo soporte. Hay un sensor de carga está unido al soporte de forma que el par de salida del conjunto puede medirse mediante el sensor de carga.
La alineación del reductor armónico respecto al eje del motor de maxon es fundamental para la vida útil del actuador. El más mínimo error de alineación puede provocar desgaste prematuro o fallos en el mecanismo. Por ello, los componentes mecanizados se fabrican para estar en paralelo a una distancia aproximada de 20 micras, mientras que la concentricidad se mantiene en unas 30 micras para alinear el anillo circular con el motor de maxon. La superficie total que ocupan los actuadores dentro el robot es de aproximadamente 80 mm en el diámetro y 90 mm en la longitud. Los componentes mecanizados que instalados en cada actuador están fabricados con aleaciones de aluminio resistentes a la fatiga, así como titanio de calidad 5 allí donde se generan altas tensiones.
El par de salida del actuador completo es de aproximadamente 30 Nm y es posible alcanzar picos superiores a 100Nm. El actuador está unido a una célula de carga extremadamente sensible con una resolución de menos de 10 mNm. Cada actuador está diseñad para alcanzar una vida útil de más de 3 millones de revoluciones.
Conclusión
Los actuadores utilizados en el Harmony SHR tienen un diseño muy madurado y no se espera que requieran grandes mejoras en el futuro. Según la empresa, es poco probable que modifiquen ninguno de los componentes COTS durante futuras revisiones, especialmente los componentes de maxon. Los motores DC de maxon pueden personalizarse fácilmente y, además, la empresa ofreció versiones con holgura reducida de los reductores para su uso en los actuadores giratorios, así como combinaciones de motores DC con escobillas de pequeño diámetro y engranajes planetarios para crear actuadores giratorios compactos. Los reductores con tornillos de potencia de la empresa también están disponibles para su uso en aplicaciones de actuador lineal. En resumen, maxon suministró todos los motores y controladores necesarios para la aplicación, por lo que Harmonic Bionics pudo confiar en un único proveedor.
Image Copyrights
Harmonic Bionics