Expert Blog
El MiniMACS6 estabiliza el péndulo de Furuta


Un problema clásico en ingeniería es el péndulo invertido rotacional. Se utiliza para demostrar y examinar patrones de movimiento y algoritmos de control en ingeniería eléctrica y de control, así como en ingeniería mecánica. Estos, a su vez, ayudan a controlar robots y otras máquinas.
El péndulo lleva el nombre de su inventor japonés, Katsuhisa Furuta, y tiene una estructura sencilla. Un brazo accionado gira en el plano horizontal y un péndulo unido a ese brazo gira en el plano vertical. El modelado teórico y la necesidad de estabilizar estos movimientos son cuestiones que atormentan a los ingenieros desde hace mucho tiempo. En el péndulo de Furuta hay dos variables: la dirección de la junta rotacional y la del péndulo, que se pueden controlar. El péndulo se controla en la posición vertical inestable, mientras que el brazo adopta cualquier otra posición. Dado que se trata de un sistema no lineal inestable, es adecuado para realizar experimentos, probar algoritmos de control y desarrollar nuevos métodos de cálculo. A menudo combina enfoques de áreas de investigación como la robótica, la teoría del control y el control computarizado.
Encontrar el controlador adecuado
Se puede desarrollar un controlador adecuado utilizando diferentes estrategias de diseño. Las estructuras de controlador adecuadas para un péndulo invertido incluyen controladores PID, LQR, difusos o neuronales con autoaprendizaje. El sistema físico con múltiples grados de libertad puede modelarse matemáticamente. Para la elevación del péndulo desde la posición de reposo (posición cero) se requieren enfoques no lineales, como los energéticos. A continuación se diseña un controlador adecuado con ayuda de la descripción matemática. Este controlador se puede aproximar o discretizar para sistemas con capacidad de tiempo real y transferirse a un controlador como el MiniMACS6-AMP4.
El controlador compacto
El maxon MiniMACS6-AMP4 es un controlador maestro programable con etapas de potencia integradas. Es el controlador estabilizador para el péndulo invertido rotacional. Permite ejecutar patrones de movimiento complejos con comandos sencillos, por ejemplo, para una sincronización sin tirones con un eje maestro giratorio. Ventajas del controlador multieje MiniMACS6-AMP4:
- Asume la función de maestro; no requiere un controlador de nivel superior
- Incluye funciones de control de movimiento sin licencia
- Solución motriz compacta con etapas de potencia integradas
El software de automatización sin licencia ApossIDE (entorno de desarrollo integrado) puede configurar tareas de posicionamiento y sincronización con comandos sencillos o ejecutar sus propios algoritmos de control utilizando C (ApossC).
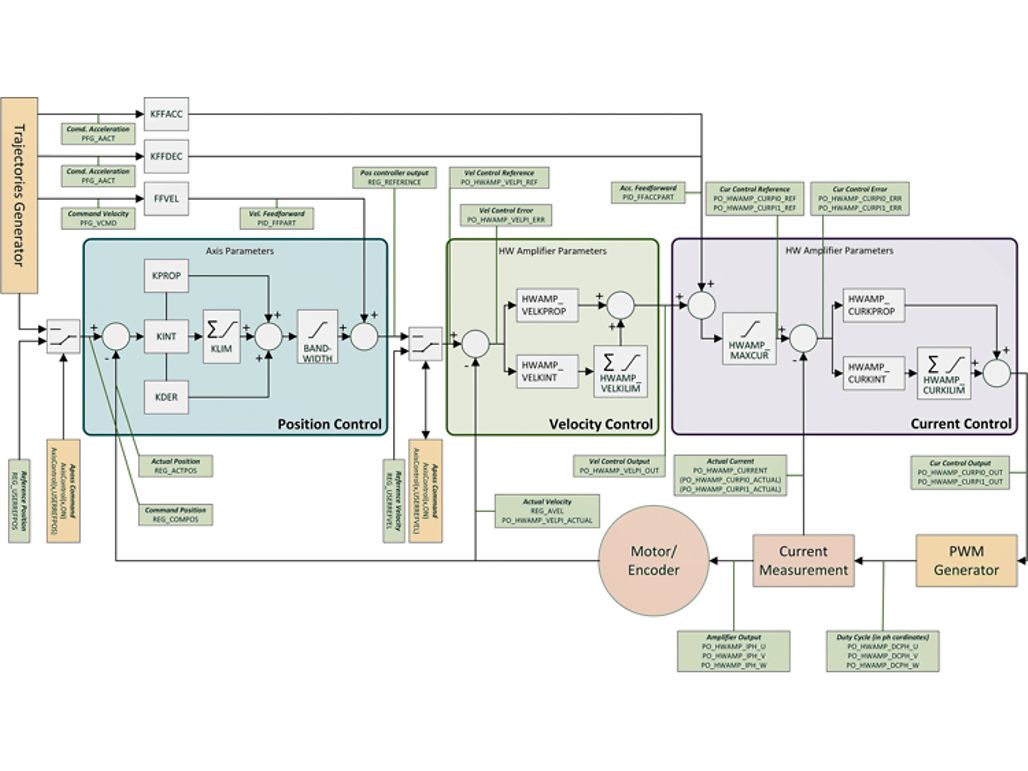
Control en cascada - Ejemplo de control en cascada con un controlador de movimiento maxon como el MiniMACS6-AMP4. La capacidad de programación y de planificación integrada de la trayectoria hacen que no sea estrictamente necesario un controlador de nivel superior.
En acción: El MiniMACS6-AMP4 estabiliza el péndulo invertido rotacional.
Controlador multieje COMPACT MiniMACS6-AMP4
El controlador multieje programable con etapas de potencia integradas es el controlador estabilizador del péndulo invertido rotacional y garantiza una sincronización sin sacudidas con el eje giratorio.
Última edición
Lea el número actual de la revista driven de maxon que contiene historias apasionantes, hechos sorprendentes e interesantes artículos técnicos sobre todos los aspectos de la tecnología motriz. Descúbrala en nuestro sitio web: maxongroup.com/driven
