Expert Blog
CAN: ¿qué es y por qué debería usarse?

Controller Area Network (bus CAN) es un estándar de bus diseñado para permitir la comunicación entre microcontroladores y dispositivos. Es un protocolo basado en mensajes y diseñado originalmente para un cableado eléctrico inteligente y fiable, y para un intercambio de datos de un número cada vez mayor de actuadores y sensores en vehículos. Diseñado originalmente como bus de campo con longitudes de línea de varios metros, hoy en día el bus CAN goza de una gran aceptación como bus de comunicación en maquinaria compacta y dispositivos.
CANopen es un protocolo de comunicación estandarizado y una especificación del perfil de dispositivos para sistemas integrados utilizados en automatización. En este tipo de redes hay un maestro CANopen para configurar y controlar todos los denominados «dispositivos esclavos CANopen» (p. ej. sensores, actuadores o controladores de movimiento). Un PC con una tarjeta CAN insertable o una puerta de enlace USB/CAN externa, un PLC con una interfaz CAN o incluso un sencillo chip de microcontrolador con una interfaz CAN pueden funcionar como maestro CANopen en este tipo de redes. Esto permite al ingeniero elegir el mejor maestro para su aplicación basándose en criterios de selección como el rendimiento, el hardware preferido, el entorno de programación y también su propia experiencia.
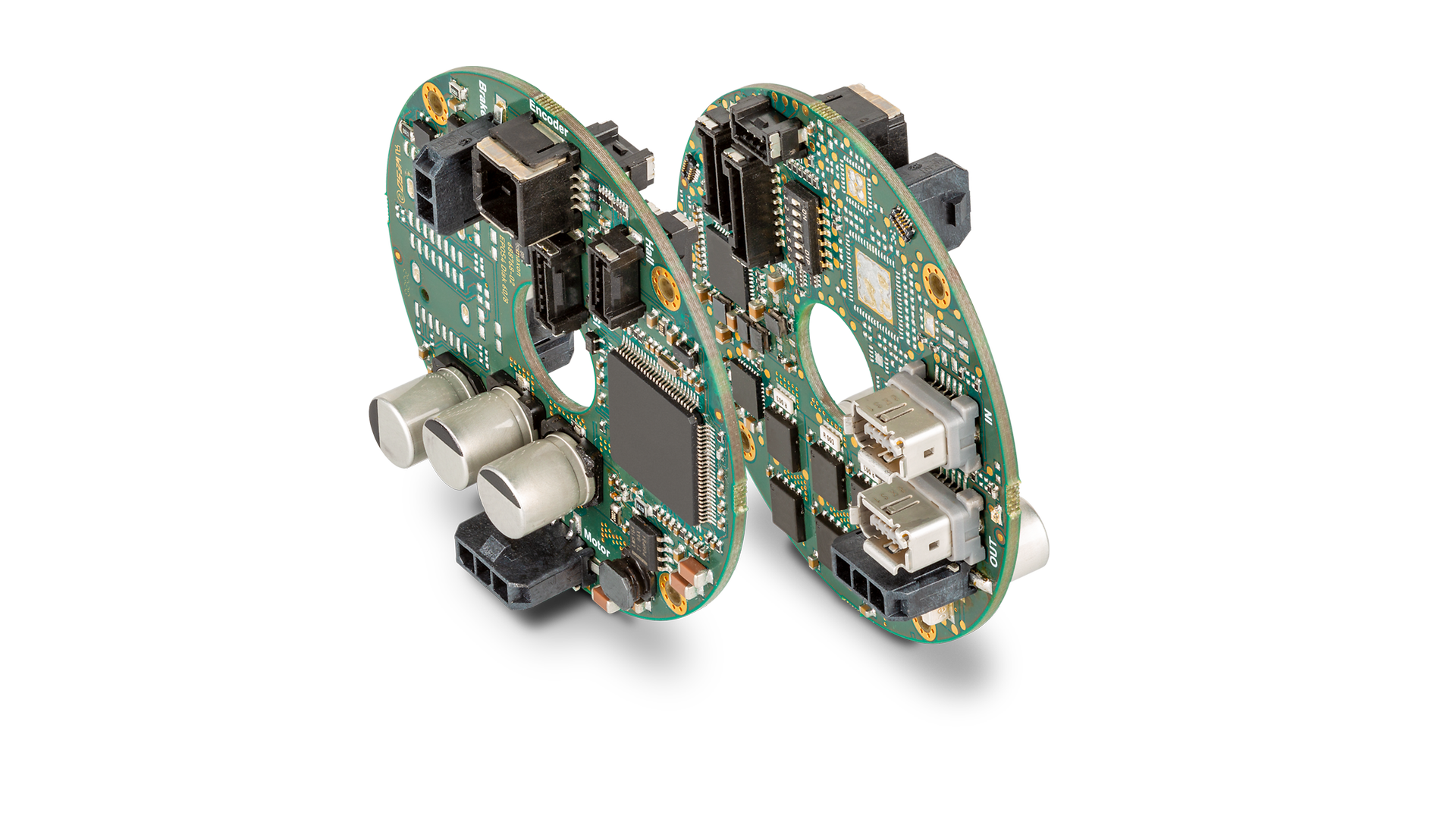
Los controladores EPOS4 de maxon motor han demostrado su eficacia en la industria con más de 1000 000 instalaciones en uso en todo el mundo para el control de posición, velocidad y corriente/par.
CAN ofrece a los ingenieros una serie de ventajas clave para los diseños adaptados a espacios limitados, como las siguientes:
- Dimensiones compactas: los buses de campo como el bus CAN permiten usar un número mayor de sensores y actuadores con un cableado mínimo.
- Rentabilidad: CAN es conocido por ser un bus de bajo coste. Esto es debido a la alta disponibilidad de microcontroladores y procesadores con controladores CAN integrados. El uso del protocolo CANopen estandarizado de acuerdo con CiA 301 y de perfiles específicos para dispositivos, como CiA 402, también reduce significativamente los costes de desarrollo de software de control.
- Estandarización y compatibilidad: CANopen es un estándar industrial de eficacia probada y ampliamente aceptado en la industria. Todos los dispositivos CANopen intercambian datos de la misma manera y el manejo de las funciones específicas de los dispositivos también se describe en los estándares de perfil de dispositivos. Por tanto, es muy sencillo sustituir o añadir dispositivos en una red de este tipo. Esto ofrece a los fabricantes de dispositivos y máquinas la máxima flexibilidad para mejorar el rendimiento de una máquina o para ofrecer funciones optimizadas sin necesidad de hacer grandes cambios en el diseño.
Un ejemplo: si un motor paso a paso con su respectivo controlador se sustituye por un motor DC con otro controlador del fabricante, el software de control apenas cambia, ya que ambos sistemas motores son casi idénticos para el CANbus cuando se utilizan perfiles CANopen. - Fácil sincronización: en el caso de los dispositivos pequeños, los requisitos de rendimiento y rango funcional también son cada vez más estrictos, y la sincronización de motores individuales para realizar procesos con movimientos más complejos, está adquiriendo cada vez más relevancia.
Los controladores EPOS4 de maxon motor son esclavos CANopen de acuerdo con el estándar CiA301 y CiA402. Estos controladores han demostrado su eficacia en la industria con más de 1000 000 instalaciones en uso en todo el mundo para el control de posición, velocidad y corriente/par. Gracias a su labor de desarrollo e integración inteligentes, maxon ofrece a los desarrolladores bibliotecas de programación y asistencia técnica de alta calidad para diferentes tipos de sistemas maestros como PLC, PC y controladores basados en Linux.
P.óngase en contacto con maxon para solicitar asistencia técnica específica de CAN