Expert Blog
1-Q vs. 4-Q controllers
In this blog, we will discuss the differences between the two types of controllers, as well as what kind of applications are appropriate for each type.
Often times, customers will come to us asking for guidance on what type of controller they need for their application, and one of the many factors things to consider when recommending a controller would be whether it is a 1-Q or a 4-Q controller. Maxon offers a variety of controllers, and some of them are 1Q such as the DEC Module family, and others are 4Q such as the ESCON, EPOS2, EPOS4, and MAXPOS families. The real question here is, what does that really mean to the customer and their application?
First, we would like to start off by showing you a diagram below depicting motor speed and motor torque over the 4 operation quadrants (n=speed, M=torque):
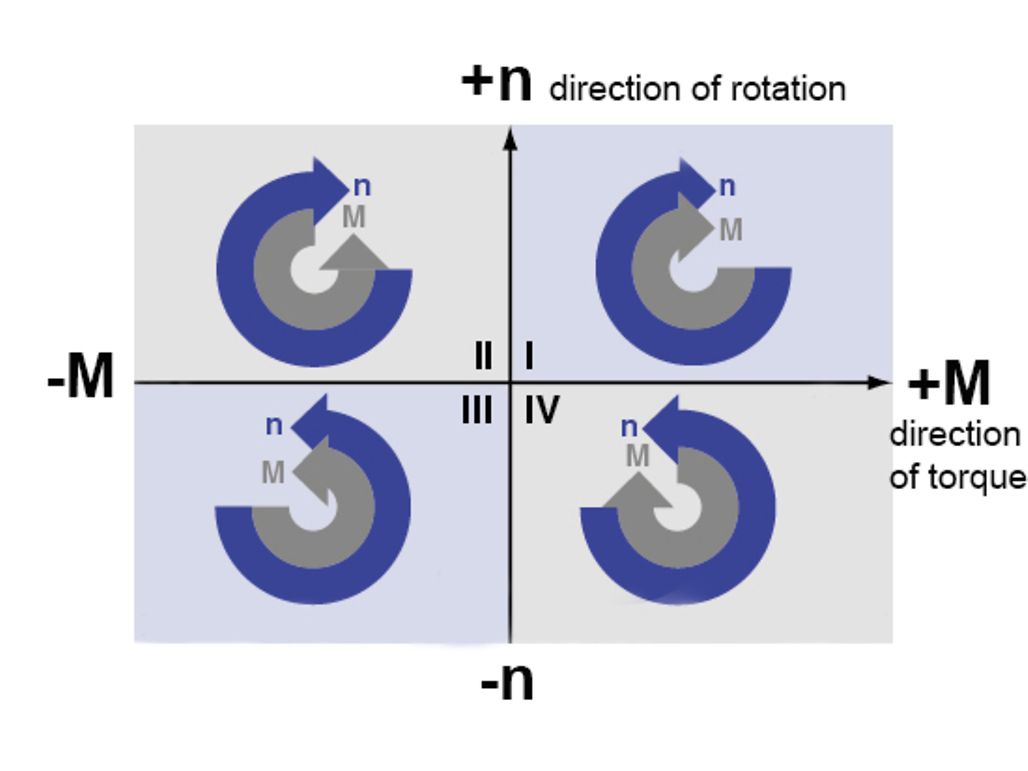
motor speed and motor torque over the 4 operation quadrants (n=speed, M=torque)
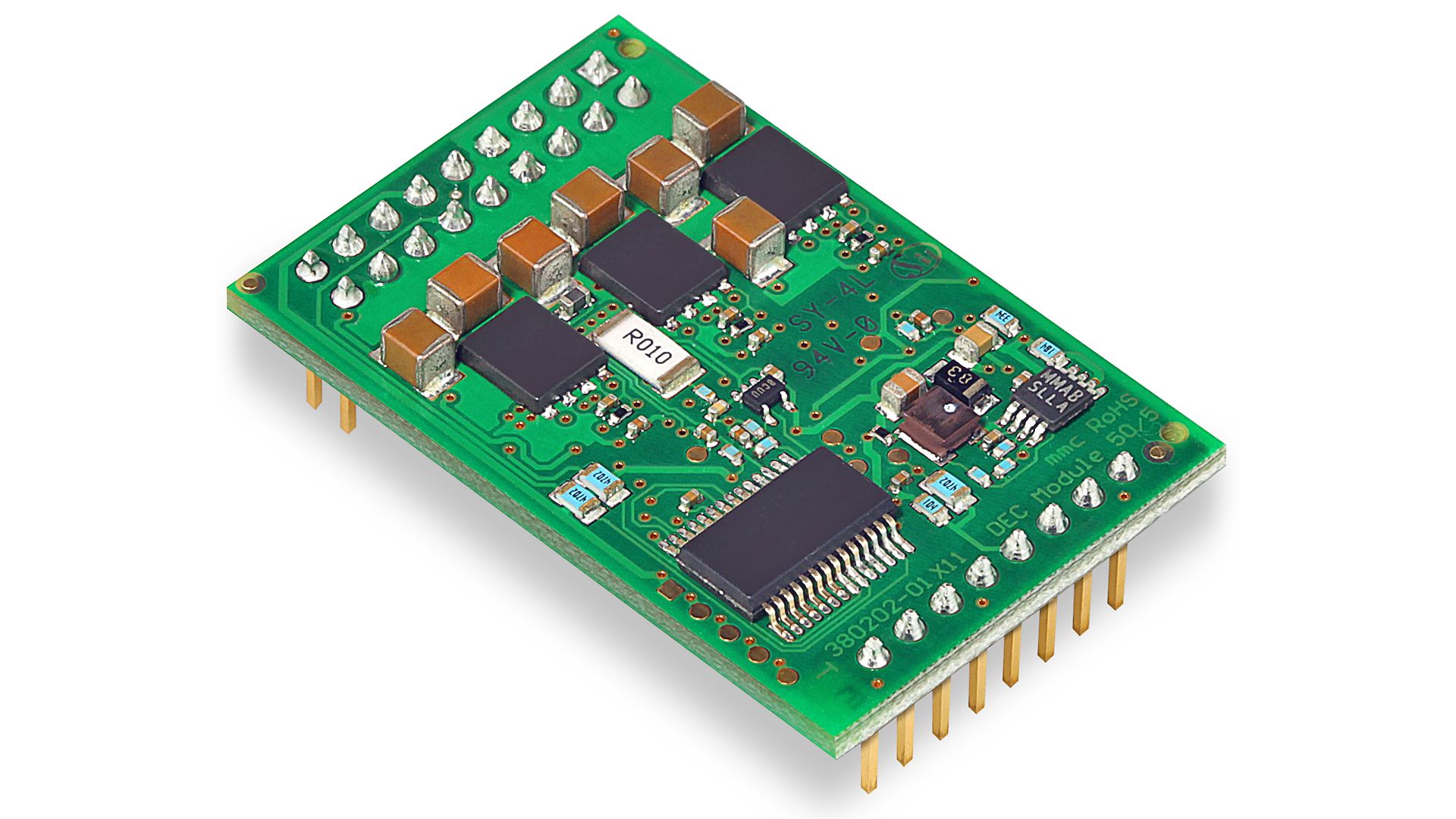
1-Q Speed Controllers (DEC Module)
Notice, Quadrant 1 and Quadrant 3 show the motor speed and torque pointing in the same direction. 1-Q controllers would be the controllers that operate within these two quadrants, see below for a few characteristics of 1-Q controllers:
- Can only accelerate the motor speed and torque in the same direction (Can only operate in the first or third quadrant)
- Allow motor current to flow in only one direction
- Do not have a regulated braking/deceleration (you cannot apply a motor torque/current in the opposite direction of rotation to slow down the motor) -> Therefore braking is often slow and drives will only decelerate with the help of friction.
Example applications:
- DEC Module (Simple Speed control): Blowers, Pumps, Cutting drives, Roller blind drives
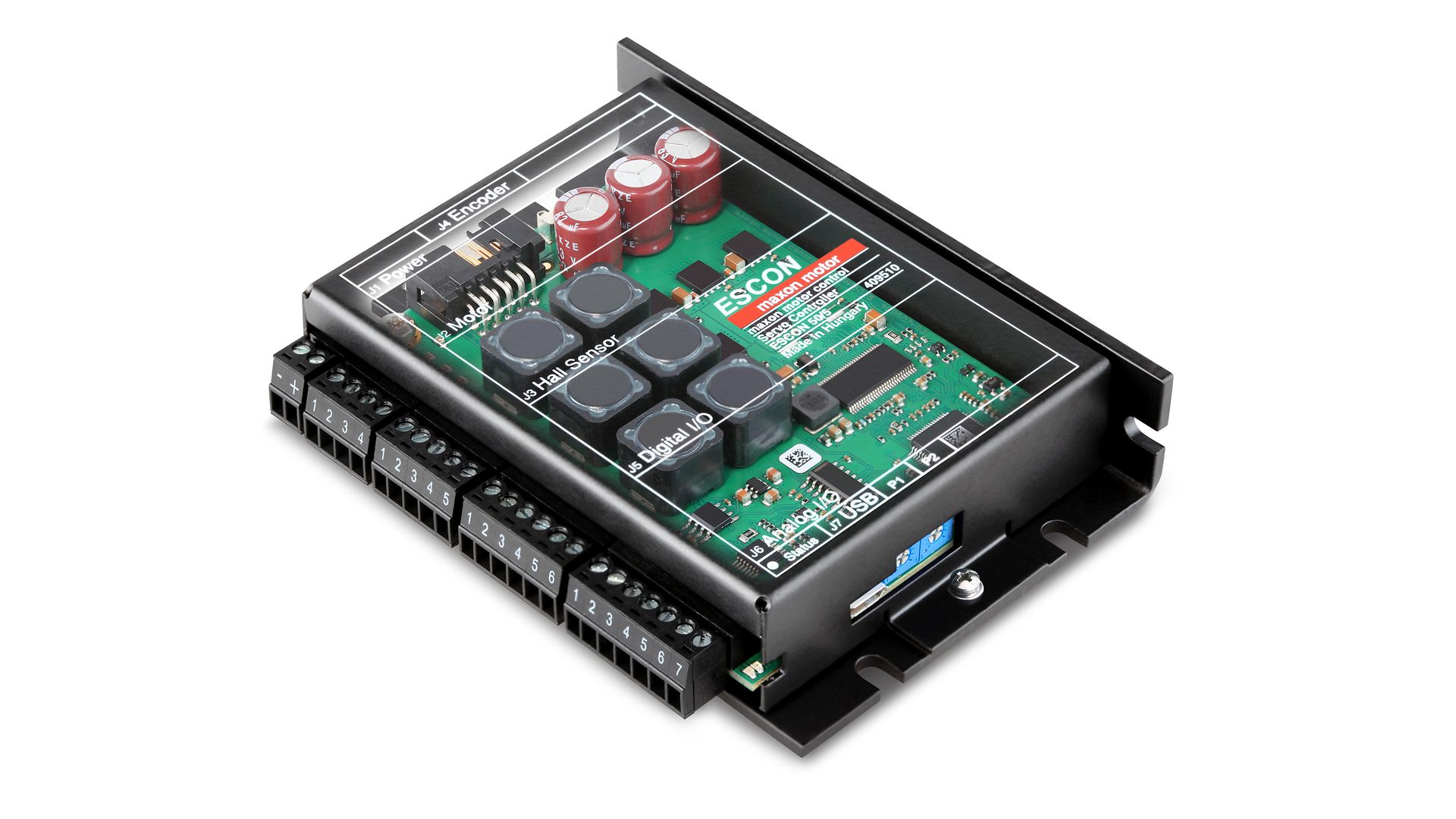
4-Q controllers (ESCON, EPOS, MAXPOS)
Notice, Quadrant 2 and Quadrant 4 show the motor speed and torque pointing in the opposite direction. With a 4-Q controller, you are free to operate in any of the quadrants shown in the diagram, see below for a few characteristics of 4-Q controllers:
- Maintain speed under changing load in both directions (whether accelerating or braking)
- Can operate in all four quadrants
- Can actively brake down motor speed (you can apply a motor torque/current opposite to the direction of rotation)
- Can have an energy flow back from the motor to the controller (power supply) during braking
- Will react fast to any speed set value changes
- Are mandatory for position control
Example applications:
- ESCON (dynamic current/speed control): Conveyor drives, Hand tools, Scanners
- EPOS2/EPOS4 (positioning/speed/current control bus): Actuators, lab automation, door drives
- MAXPOS (highly dynamic position/speed/current control bus): Robotics, Pick-and-place, On-the-fly processing
To summarize, 1-Q and 4-Q controllers both have their advantages and disadvantages, and it comes down to the customer’s needs and requirements that will determine which type of controller will work best for their application.