maxon Story
ALLEX, A New Paradigm in Humanoid Robotics


From sensing 100 grams of fingertip force to lifting over 30 kilograms with a hook grip, ALLEX combines human-like dexterity, strength, and safe interaction to redefine humanoid robotics.
WIRobotics, guided by the vision “Technology for People, Enhancing Quality of Life,” is a leading company specializing in humanoid and wearable robots that prioritize human-centered safety and precision.
Located within the Korea University of Technology and Education, the company operates the Robotics Innovation Hub, an advanced research lab where academic and industrial partners collaborate to validate and share emerging robotic technologies.
maxon and WIRobotics have established a strategic partnership to jointly develop and verify core actuation technologies. In addition, the company continues to advance its technology through collaborations with prominent domestic and international research institutions. Building on this philosophy, WIRobotics developed the humanoid robot ALLEX, designed to achieve human-level manipulation and interaction capabilities.
ALLEX introduces a new research paradigm — “Beyond Motion, Toward Interaction” — and serves as the foundation platform for Physical AI research.
To realize ALLEX’s core objectives of human-like agility, precision, and safe interaction, maxon’s high precision motors were integrated with WIRobotics’ proprietary reducers, creating a high-performance drive system that goes beyond conventional motor solutions.
Rethinking Contact
For decades, robots have been built to avoid contact. In traditional robotics, physical contact was treated as a collision — something dangerous, something to be prevented. But human beings live and work in contact: we shake hands, we carry objects together, we adjust when bumped into.
ALLEX, developed by WIRobotics, takes a different path. Instead of avoiding touch, it embraces it — and goes further by precisely sensing and responding to the interaction forces that occur during it. This transforms contact from a failure event into a source of capability.
Conventional robots have treated physical contact as a collision — something to be avoided. ALLEX, on the other hand, enhances its performance by actively making use of physical contact.
This fundamental shift — from avoiding touch to leveraging it — is what makes ALLEX not just another humanoid, but a foundation for a new generation of interaction-centered robotics.
Arms – Lightweight, Compliant, and Backdrivable
The level of backdrivability WIRobotics aimed for could not be achieved by combining commercial drive units. This realization led the team to develop their own, achieving one-tenth the friction and one-twenty-fourth the inertia of comparable reducers.
ALLEX’s arms were designed with an optimal backdrivable structure that allows them to move with the agility of a human arm while remaining safe and compliant during interaction.
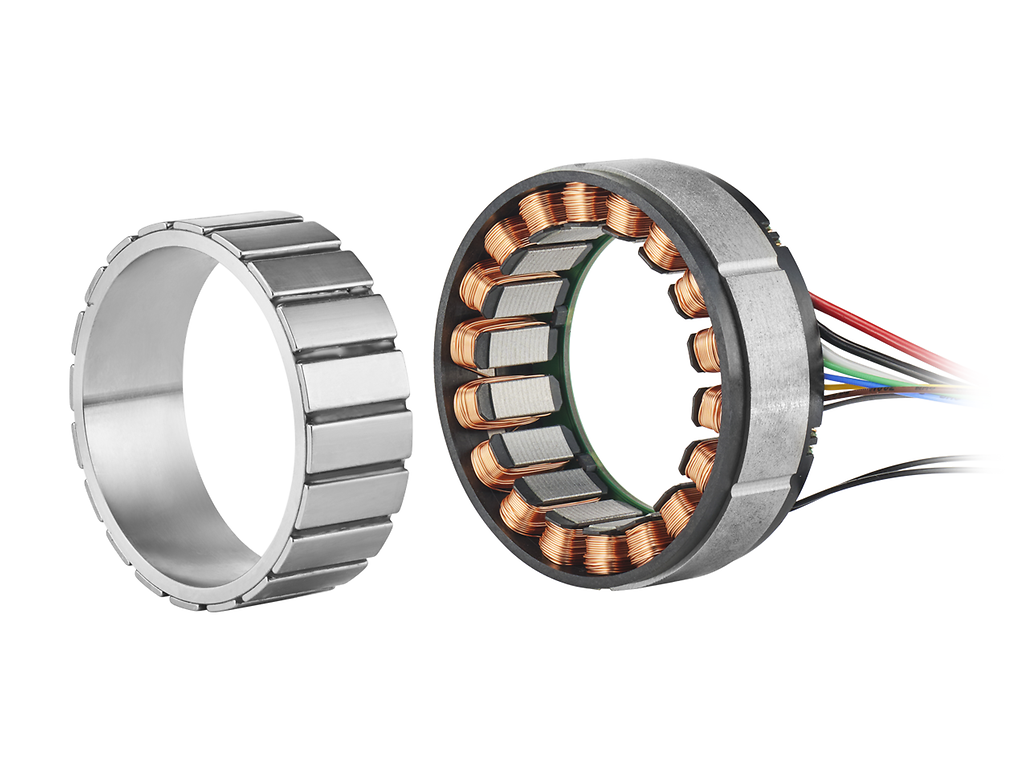
At the core of this achievement is maxon’s ultra-slim frameless motor, developed and produced in Korea. The motor delivers high torque while maintaining a slim and compact structure, making it ideal for efficient drive systems even within limited space. When combined with WIRobotics’ proprietary reducer, it enables extremely low friction and minimal rotational inertia, significantly enhancing the arm’s agility and backdrivability.

Five of the seven actuators are positioned near the shoulder to reduce distal inertia and increase the responsiveness of the arm’s end. As a result, the total mass below the shoulder is only about 5 kg, achieving a perfect balance of speed, safety, and strength.
Hands – Human-like Dexterity in a Compact Size
Each of ALLEX’s hands includes 20 joints, 15 of which are active degrees of freedom, matching the size of a human hand.
Six high-output actuators are located in the forearm, while smaller actuators for fine motions are embedded in the palm, enabling an efficient distribution of strength and precision.


The compact maxon motors integrated into this design deliver high speed performance with low vibration and minimal heat generation, ensuring excellent torque transmission characteristics. In addition, ALLEX’s hands adopt a highly backdrivable structure that allows flexible response to external forces, providing precise and natural motion control.
This advanced configuration allows ALLEX’s hands to achieve both precision and power:
- Detecting 100 g of external force without tactile sensors
- Generating up to 40 N of fingertip force
- Manipulating 3 kg payloads stably
- Lifting over 30 kg using a hook grip
Despite its strength, the hand remains lightweight and compact, maintaining human-like proportions while achieving next-generation performance.
We see ALLEX’s hand as the next-generation standard for humanoid hands — flexible yet strong, precise yet human-sized.
Waist and Neck – Passive Gravity Compensation
ALLEX’s waist and neck each provide two degrees of freedom, supported by passive gravity compensation mechanisms. In the waist, this system balances the weight of the entire upper body, regardless of the posture or load of the arms.

By mechanically neutralizing gravity, the joints demand only minimal torque, enabling safe, compliant, and energy-efficient movement. This passive design also makes ALLEX naturally responsive to contact while reducing strain on the motors during extended use.
The waist compensates for the entire upper body, regardless of the posture of both arms.
System Integration – Real-Time Coordination
With 48 degrees of freedom in total, ALLEX operates on EtherCAT high-speed comunication managed by WIRobotics’ custom controller. This architecture provides synchronized, real-time whole-body coordination, from the fingertips to the torso.
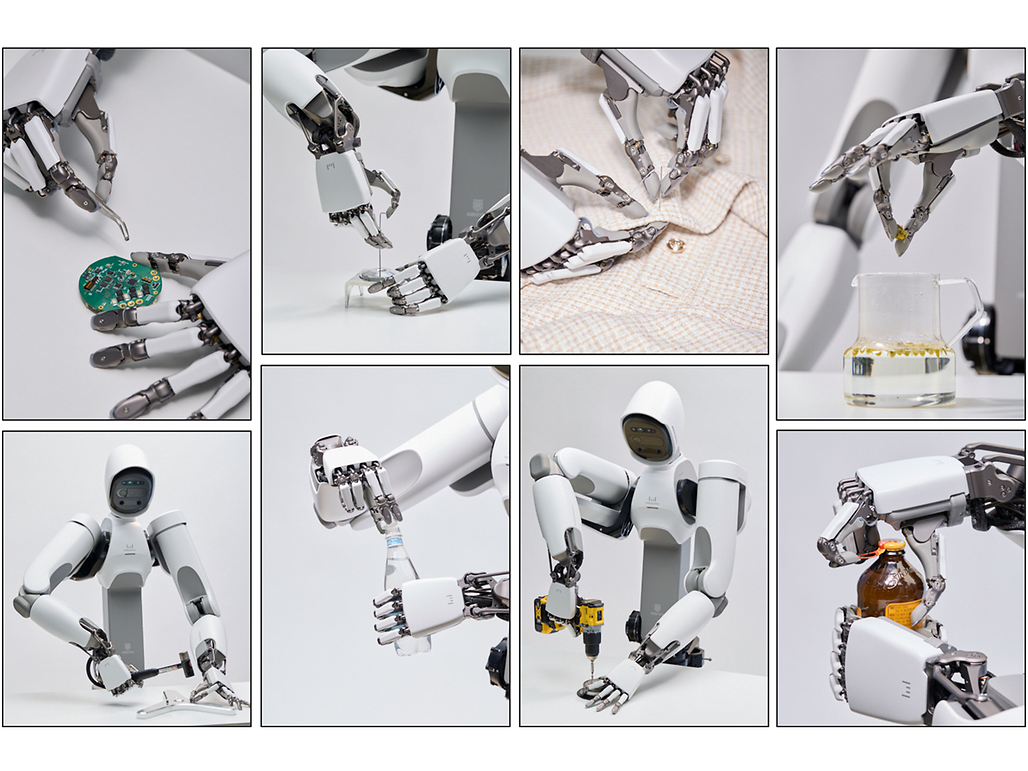
ALLEX’s hands demonstrate the full spectrum of human-level manipulation (picture above)—from micro-assembly and delicate sewing to high-force drilling, bottle opening, and everyday tasks. Powered by twenty joints with fifteen active degrees of freedom and exceptionally backdrivable actuators, the system moves seamlessly between precision, speed, and strength, capturing the essence of human dexterity in a single robotic platform.
ALLEX – A Living Platform for Physical-AI Research
ALLEX is more than a display of human-like dexterity. It is designed to serves as a standard platform for next-generation Physical-AI, enabling universities and advanced R&D teams to study how robots learn not only motion but the physics of interaction. Researchers can explore contact-rich tasks—combining reinforcement and imitation learning with emerging robot-foundation models—on a single, unified system.
From Gentle Grip to Dynamic Force
ALLEX’s high-DoF dexterous hands move effortlessly from delicate micro-assembly to dynamic, high-impact tasks: sewing a button, lifting a bottle tab, tightening bolts with an L-wrench, or driving a hammer strike. This rare combination of sensitivity and strength closes a long-standing gap in robotics—where industrial arms excel at heavy loads but lack finesse, and research hands are precise but fragile. Built with mechanically transparent, highly backdrivable actuators, ALLEX maintains real-time responsiveness across the entire chain of arm, wrist, and fingers, capturing the full spectrum of human-level manipulation in one platform. It demonstrates not isolated tricks but a continuum of control, letting engineers test everything from sub-millimeter precision to sudden impact without changing hardware.
ALLEX sets a new benchmark for robots that learn not only how to move, but how to interact—with the world and with us.
Beyond Motion – Towards Interaction-Centered Robotics
In robotics today, a variety of approaches — such as reinforcement learning, imitation learning, and the development of robot foundation models through VLMs and VLAs — are being actively explored. However, none of these methods have yet produced a breakthrough comparable to the impact that large language models have had in AI.
The reason lies in focus. Most of these approaches have been attempted mainly from the perspective of motion, rather than interaction. It is not that researchers overlooked interaction, but that there has been a lack of robots capable of interacting naturally like humans while precisely capturing the forces involved.
Without robots capable of true interaction, progress in robotics will remain limited to motion.
Redefining the Future of Humanoids
ALLEX goes beyond being a robot — it represents the future of human–robot collaboration. It redefines how robots learn, adapt, and interact, establishing itself as a living platform for Physical-AI research.
At the heart of this vision lies WIRobotics’ innovative design and control technology, strengthened by maxon’s precision drive solutions, which elevate ALLEX’s completeness and reliability.
From the delicate motion at the fingertips to the balanced waist and flexible neck movements, every element of precision in ALLEX embodies the synergy between WIRobotics’ engineering excellence and its collaborative partners — achieving accuracy, reliability, and responsive sensitivity.
Building on this technological foundation, maxon and WIRobotics are continuing their close technological collaboration to pioneer a new era of robotics. This partnership extends beyond simple component supply, as both companies work together to create a future where humans and robots coexist and interact in harmony.
ALLEX is now evolving beyond a robot that merely moves — into one that learns, senses, and truly interacts with humans.